

A high-precision control method for piezoelectric ceramic actuators
A technology of piezoelectric ceramics and control methods, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that the dynamic performance of the closed-loop system is difficult to be effectively guaranteed, and the nonlinear characteristics of piezoelectric ceramics are not compensated. Complicated controller design and other issues, to achieve large low-frequency gain, improve actual performance, and improve linearity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
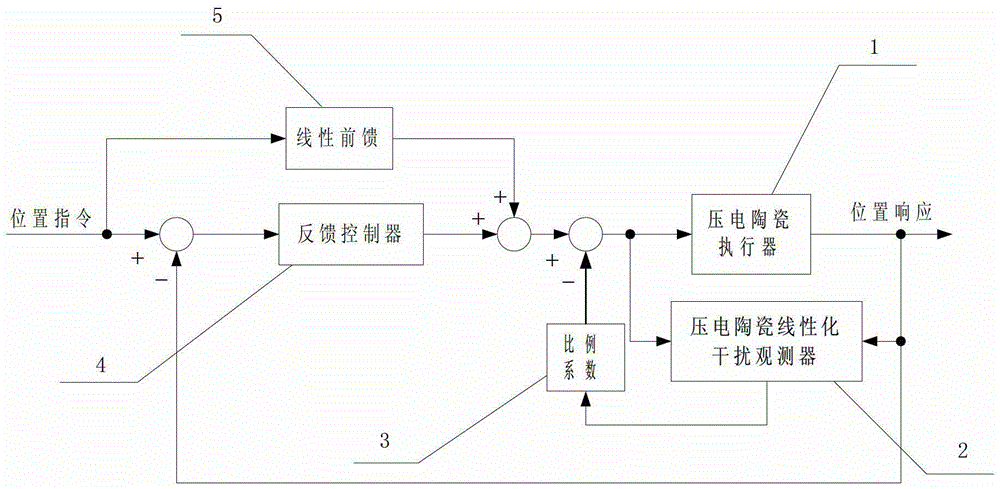
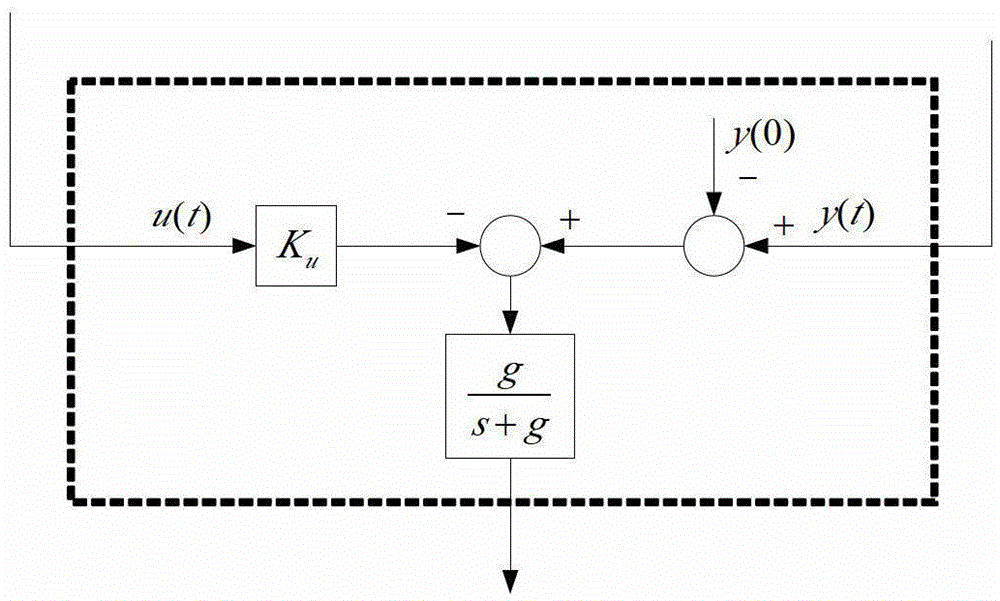
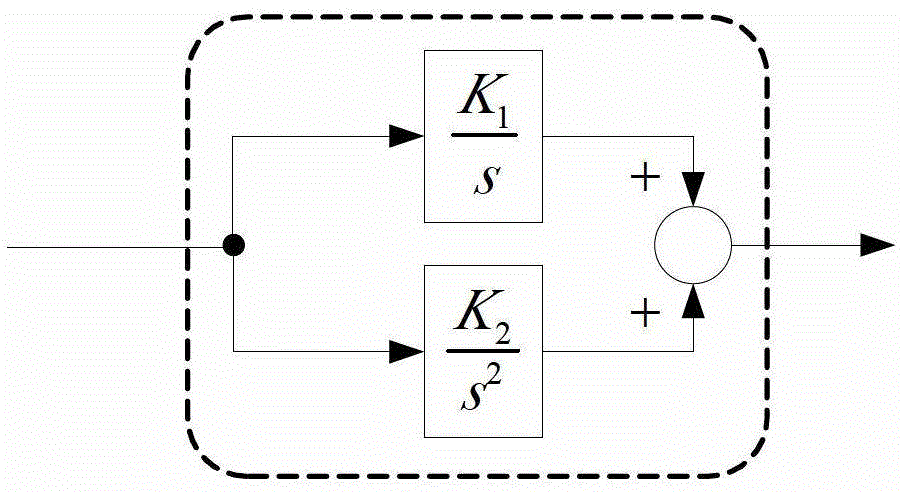
[0027] Specific implementation mode 1. Combination Figure 1 to Figure 4 Describe this embodiment, a high-precision control method of a piezoelectric ceramic actuator, assume that the position response of the piezoelectric ceramic actuator 1 is represented by y(t), and the initial value is y(0); input to the piezoelectric ceramic actuator The control voltage of the actuator is u(t), then the dynamic characteristics of the piezoelectric ceramic actuator are
[0028] M y · · ( t ) + y ( t ) = H [ u ( t ) ] + d e q u ( t ) + Δ + ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More