

A UAV search and positioning method for wilderness targets
A technology of search and positioning and target positioning, which is applied in the field of UAV search and positioning of wilderness targets, and can solve problems such as attitude sensing sensor, GPS positioning system error, low single-machine positioning accuracy, and difficult target positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
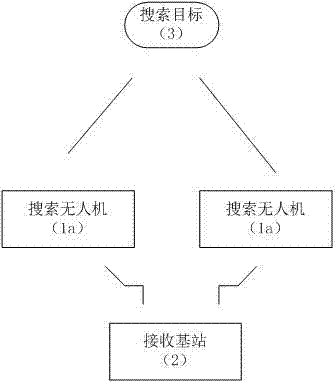
[0021] Such as figure 1 As shown, the UAV search and positioning method for targets in the wilderness: two search UAVs (1a, 1b) are used to search for target information in the wilderness, and wirelessly transmit to the receiving base station (2), and the receiving base station (2) performs target Positioning iterative calculation, quickly and accurately obtain target positioning information.
Embodiment 2
[0023] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
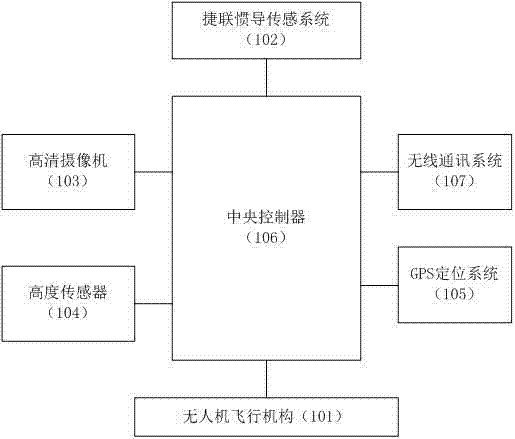
[0024] see figure 2 , the search drone (1a, 1b) includes a drone flight mechanism (101), a strapdown inertial navigation sensing system (102), a high-definition camera (103), a height sensor (104), a GPS positioning system (105), a central controller (106) and a wireless communication system (107), the central controller (106) is respectively connected with the strapdown inertial navigation sensor system (102), high-definition camera (103 ), an altitude sensor (104), a GPS positioning system (105), a central controller (106) and a wireless communication system (107) are connected and installed together on the drone flight mechanism (101).
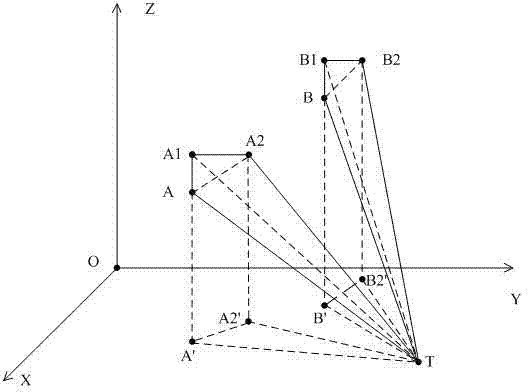
[0025] see image 3 , the specific operation steps of the positioning iterative calculation method are as follows:
[0026] Assume that the target in the three-dimensional coordinate map is point T, and the starting points of the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More