

Geometric coordinate transformation guide control method for achieving positioning rotation of dynamic positioning ship
A positioning rotation and dynamic positioning technology, applied in the field of PID control, can solve problems such as no implementation method given
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be described in further detail below in conjunction with the accompanying drawings.
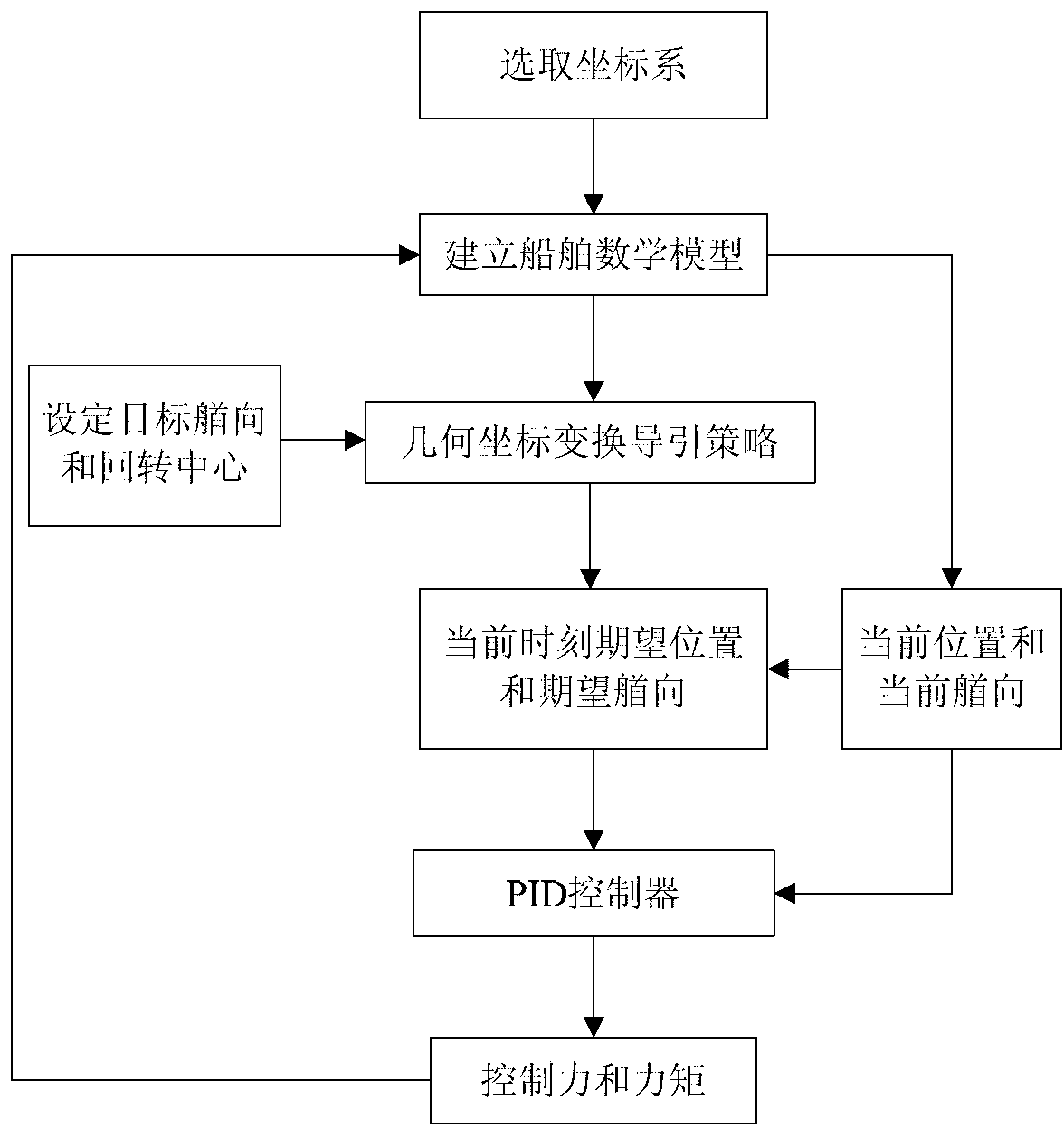
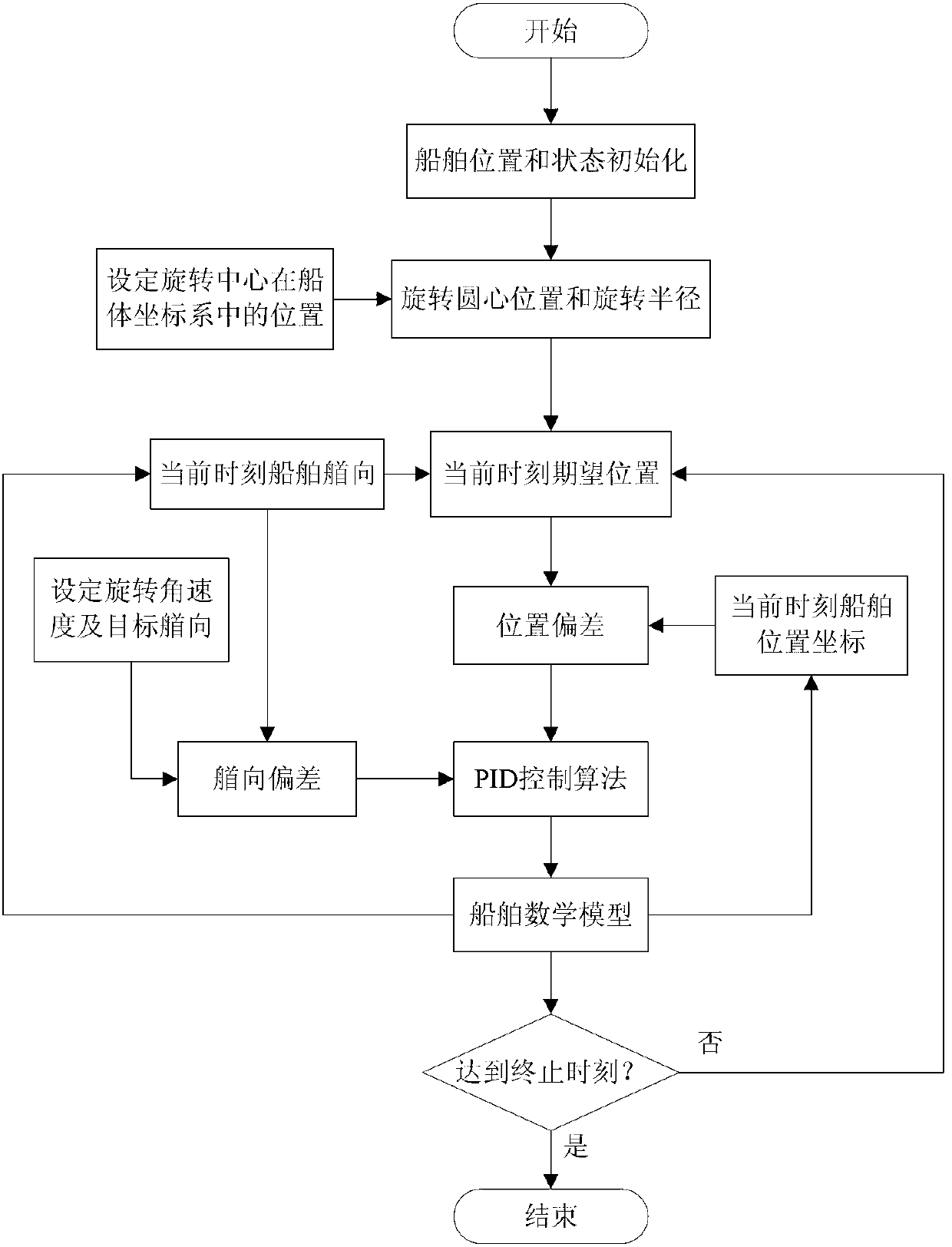
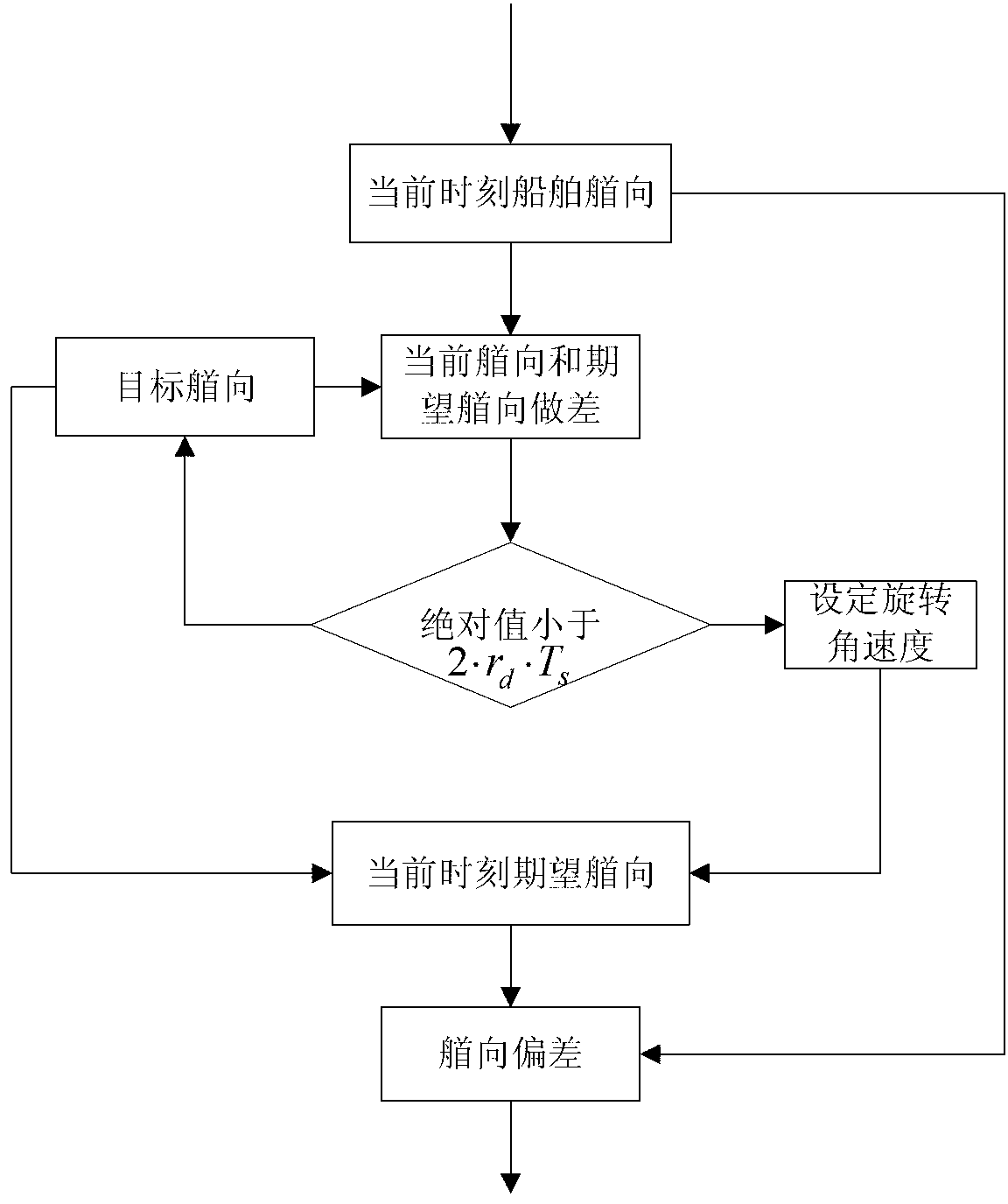
[0062] The flow chart of the guidance control method for positioning and rotating a dynamically positioned ship around a given rotation center based on the PID control method proposed by the present invention is shown in the attached figure 1 And attached figure 2 as shown, figure 2 The method of obtaining the middle heading deviation is as follows: image 3 As shown, the main steps of the method are as follows:
[0063] (1) Establish the kinematics and dynamics model of the low-speed motion of the ship
[0064] as attached Figure 4 As shown, the origin of the geodetic coordinates is selected as O E , North is the true north direction, East is the true east direction, n represents the north position coordinate, e represents the east position coordinate, ψ represents the ship heading angle (the angle between the ship heading and the true north directio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More