

All-directional horizontal-posture stair climbing robot, zero-radius turning method and stair climbing method
A technology of horizontal attitude and robot, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of lack of horizontal ground walking and steering functions, practical use limitations, and inability to be widely promoted, and achieve good mobility, simple structure, Sophisticated Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0031] In order to make the present invention more comprehensible, preferred embodiments are described in detail below with accompanying drawings.
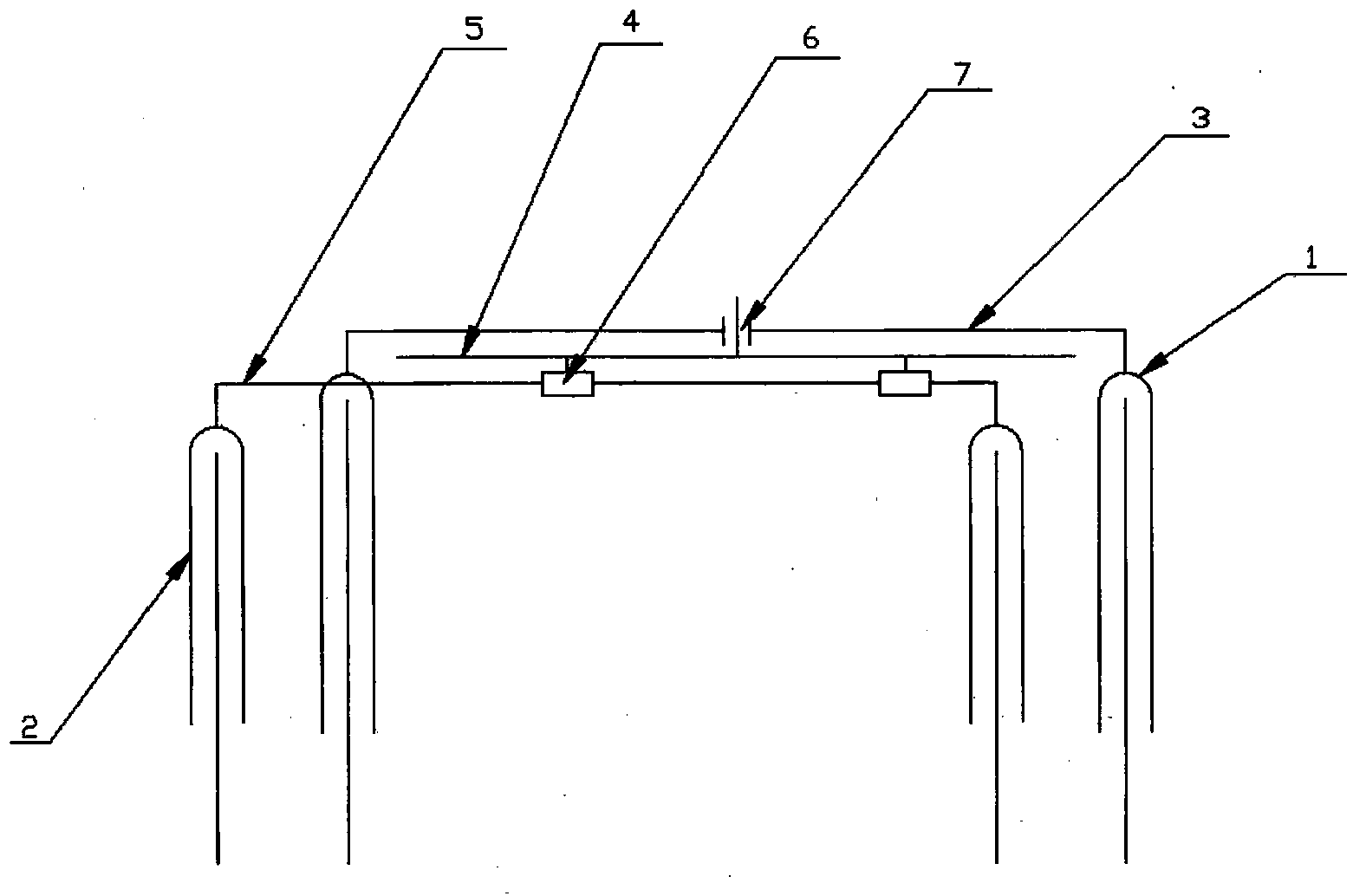
[0032] combine figure 1 and figure 2 , a kind of omni-directional horizontal posture stair-climbing robot provided by the present invention, comprises lower deck 5 and the upper deck 3 that is positioned at its top, is provided with two or four sets of lower deck hoisting mechanisms 2 that drive its lifting below the lower deck 5, Below the upper table 3, there are four sets of upper table lifting mechanisms 1 to drive it up and down. The lower table 5 and the upper table 3 are staggered back and forth in the horizontal direction, and a supporting rotating plate 4 is provided between the lower table 5 and the upper table 3. The bottom of the supporting rotating plate 4 is provided with a linear moving unit 6, and the bottom of the linear moving unit 6 is arranged on the lower table 5, and the upper table 3 is provided with a rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More