

Semi-physical simulation experimental system for quad-rotor unmanned aerial vehicle and experimental method of semi-physical simulation experimental system
A technology for unmanned aerial vehicle and semi-physical simulation, applied in general control systems, control/adjustment systems, instruments, etc., can solve the problems of poor system stability and real-time performance, inconvenient data analysis methods, and insufficiently intuitive simulation effects, etc. Achieve the effects of shortening the R&D cycle, ensuring portability and versatility, and fast and stable data interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] A kind of quadrotor unmanned aerial vehicle hardware-in-the-loop simulation experiment system and experiment method of the present invention are described in detail below in conjunction with embodiment and accompanying drawing.
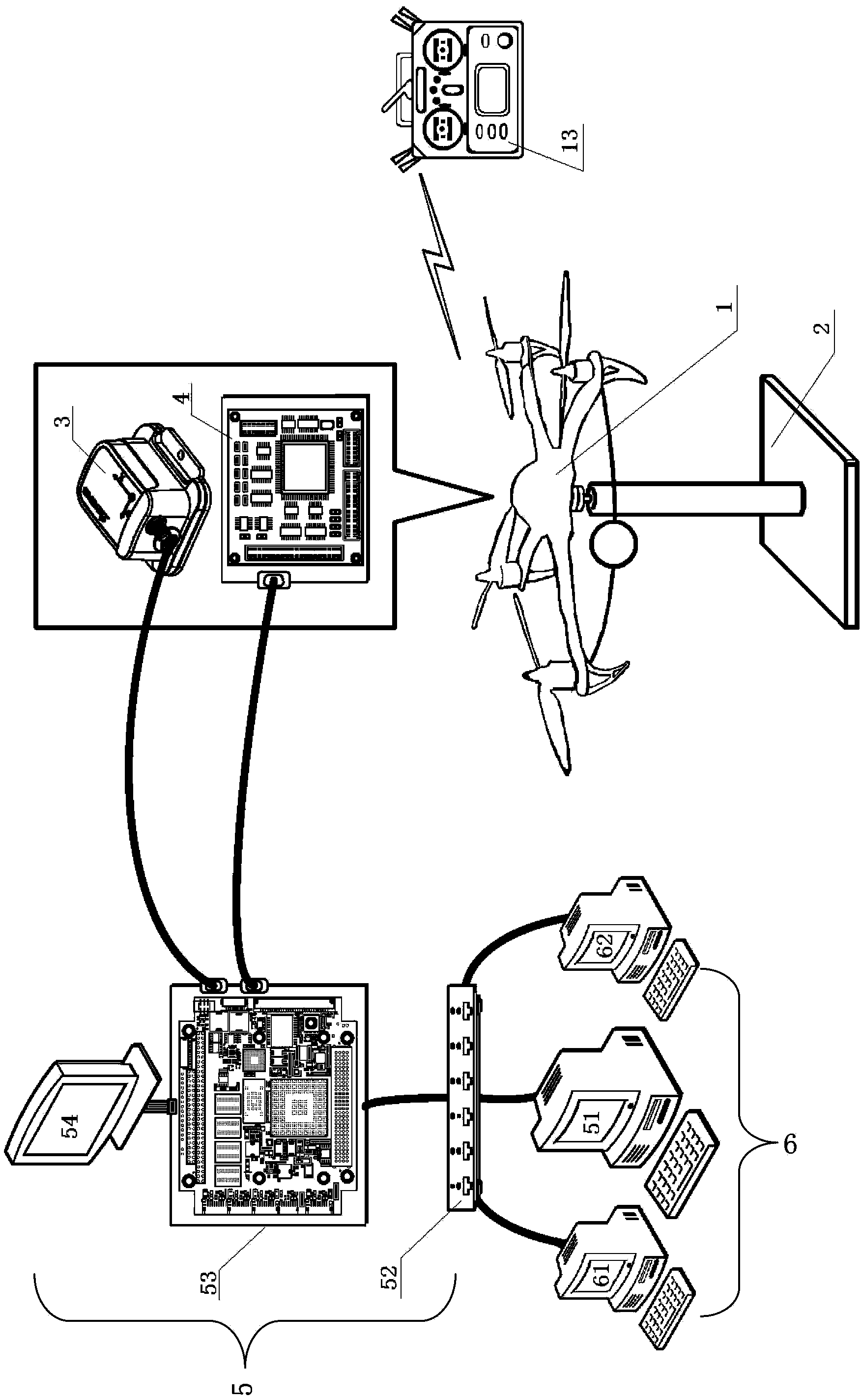
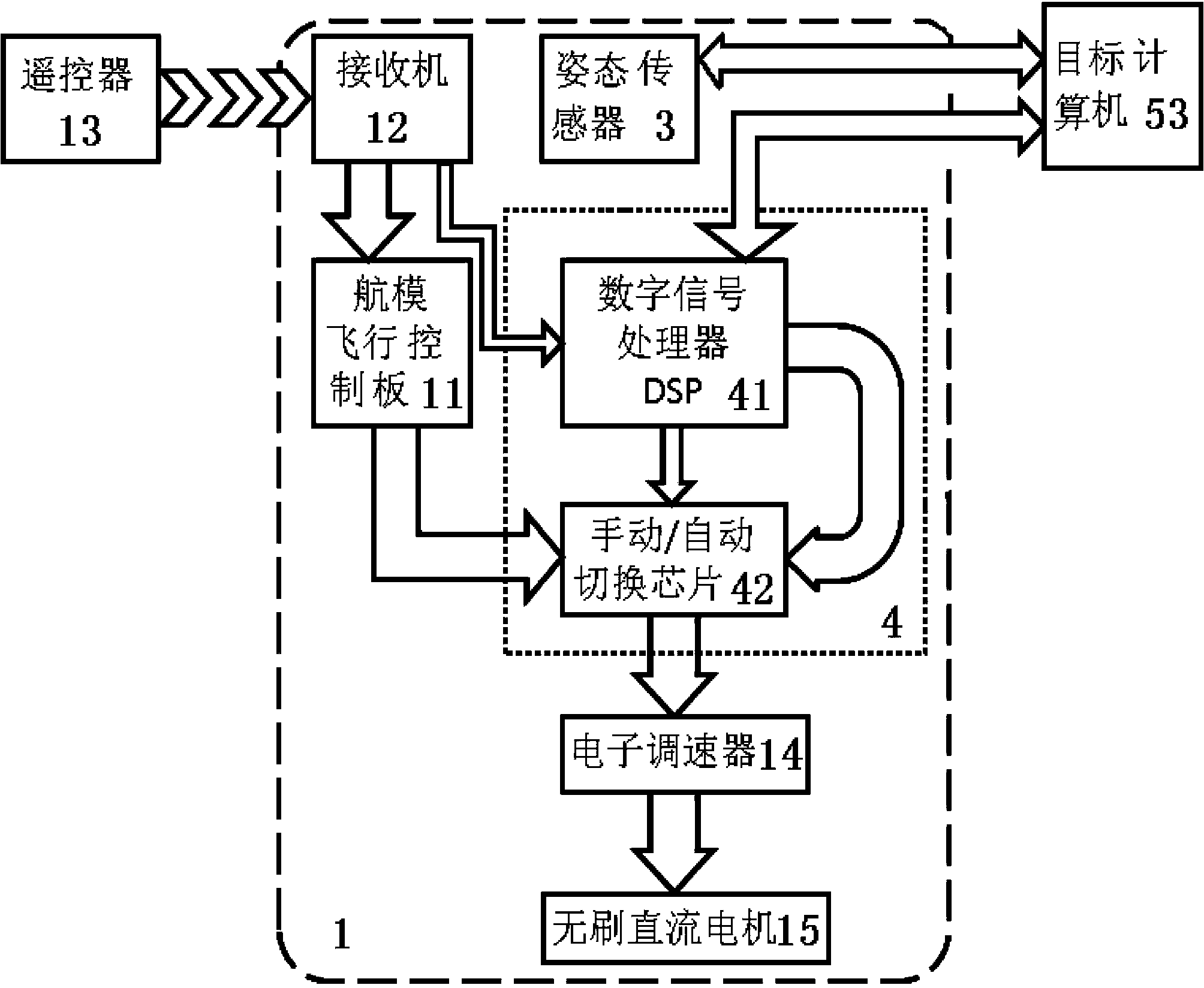
[0035] A semi-physical simulation experiment system and experimental method for a four-rotor unmanned aerial vehicle of the present invention builds a semi-physical simulation platform for the four-rotor unmanned aerial vehicle, uses a real aircraft model aircraft, and makes a three-dimensional model containing universal ball joints for it. The degree of freedom turntable uses the MTi inertial navigation unit as the attitude sensor, uses the PC / 104 embedded computing as the target computer controller of the flight simulation, makes the bottom control board based on the digital signal processor (DSP), and uses the Matlab real-time toolbox to build The real-time simulation environment, combined with the virtual display technology of Google Earth a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More