

Novel modular bionic underwater robot based on full-flexible pectoral fins
An underwater robot, a modular technology, applied to non-rotating propulsion elements and other directions, can solve problems such as insufficient pectoral fin compliance, and achieve the effects of good compliance and drag reduction, adjustable center of gravity, and low underwater resistance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] specific implementation plan
[0039] The present invention will be further described below in conjunction with the accompanying drawings.
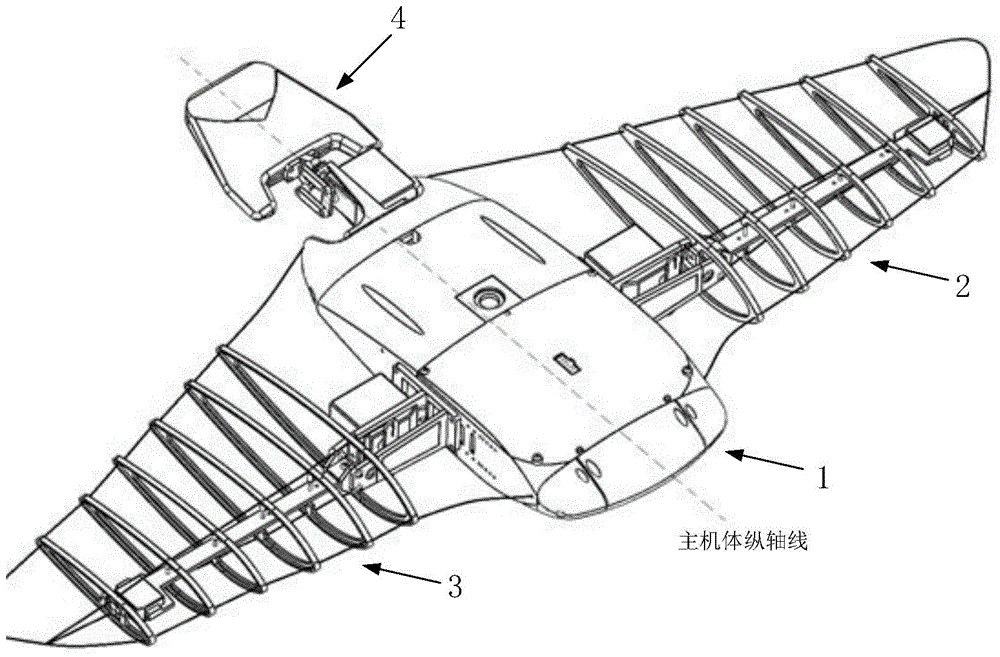
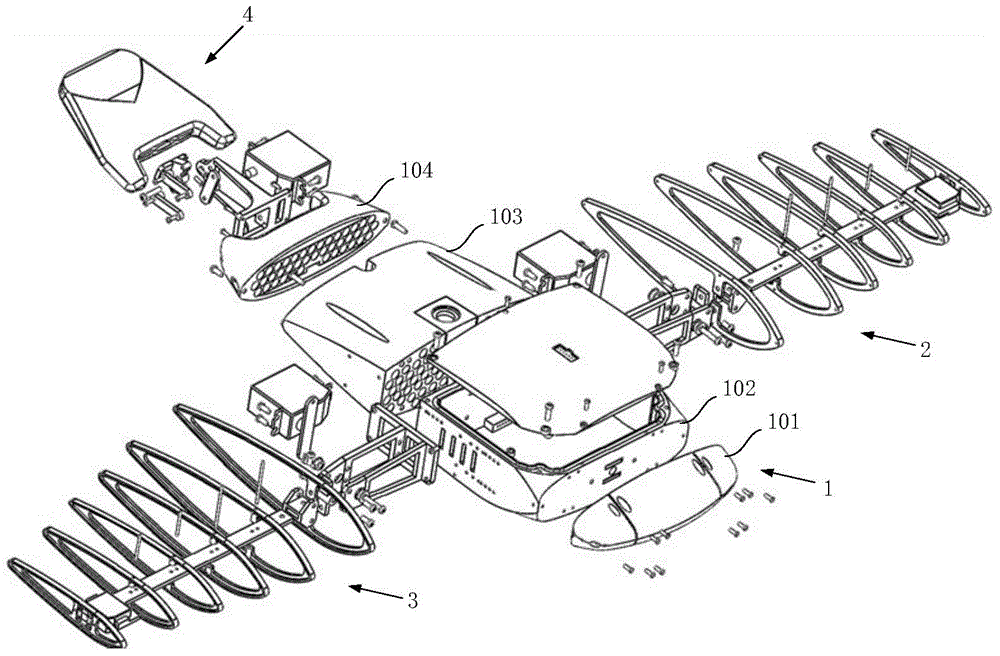
[0040] The novel modular bionic underwater robot based on fully flexible pectoral fins of the present invention adopts a modular design and includes a main body 1, a left flexible pectoral fin module 2, a right flexible pectoral fin module 3 and a tail fin module 4, such as figure 1shown. The left flexible pectoral fin module and the right flexible pectoral fin module 3 have the same structure, and are respectively mounted on the left and right sides of the main body 1 through fin connectors, and are symmetrical in mirror image. The tail fin 405 module 4 is screwed to the rear of the main body 1 through the tail fin connector.
[0041] The main body 1 adopts a segmented design, including 4 sections of cabins, along the longitudinal axis from front to back, there are sensing cabin 101, control cabin 102, middle section cabin 103...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More