

Auxiliary driving obstacle detection method based on binocular stereoscopic vision
A binocular stereo vision and obstacle detection technology, applied in the field of environmental perception, can solve problems such as obstacle height restrictions and incomplete obstacle height information collection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0057] The main task of the present invention is to provide a driving assistance obstacle detection method based on binocular stereo vision, so as to realize real-time detection of obstacles directly in front of the vehicle when the vehicle is stationary or driving.
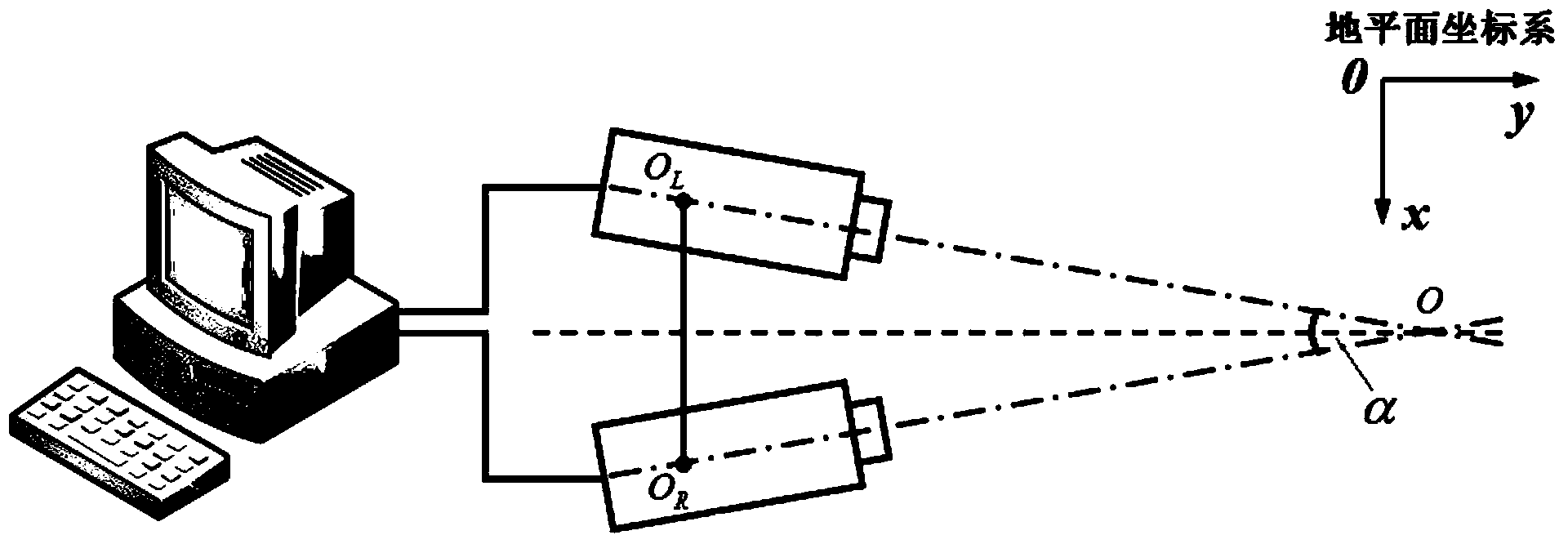
[0058] according to figure 1 As shown, the detection equipment required to implement the obstacle detection method of the present invention includes two CCD cameras with optical lenses, a computer and a buzzer for alarm. The parameters of the two CCD cameras are exactly the same, and the parameters of the two optical lenses are exactly the same. Two CCD cameras are installed directly in front of the vehicle, and the line O between the imaging centers of the two CCD cameras is L o R It is called the binocular baseline, and its length range can be arbitrarily selected, but it sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More