

Inertial positioning method and system using vision-aided correction
An inertial positioning and visual technology, applied in the field of inertial positioning, can solve the problems of inconvenient strike experience, incorrect positioning and orientation information, etc., and achieve the effects of short correction time, accurate correction, and low power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In order to have a clearer understanding of the technical features, objectives and effects of the present invention, the specific embodiments of the present invention will now be described in detail with reference to the accompanying drawings.
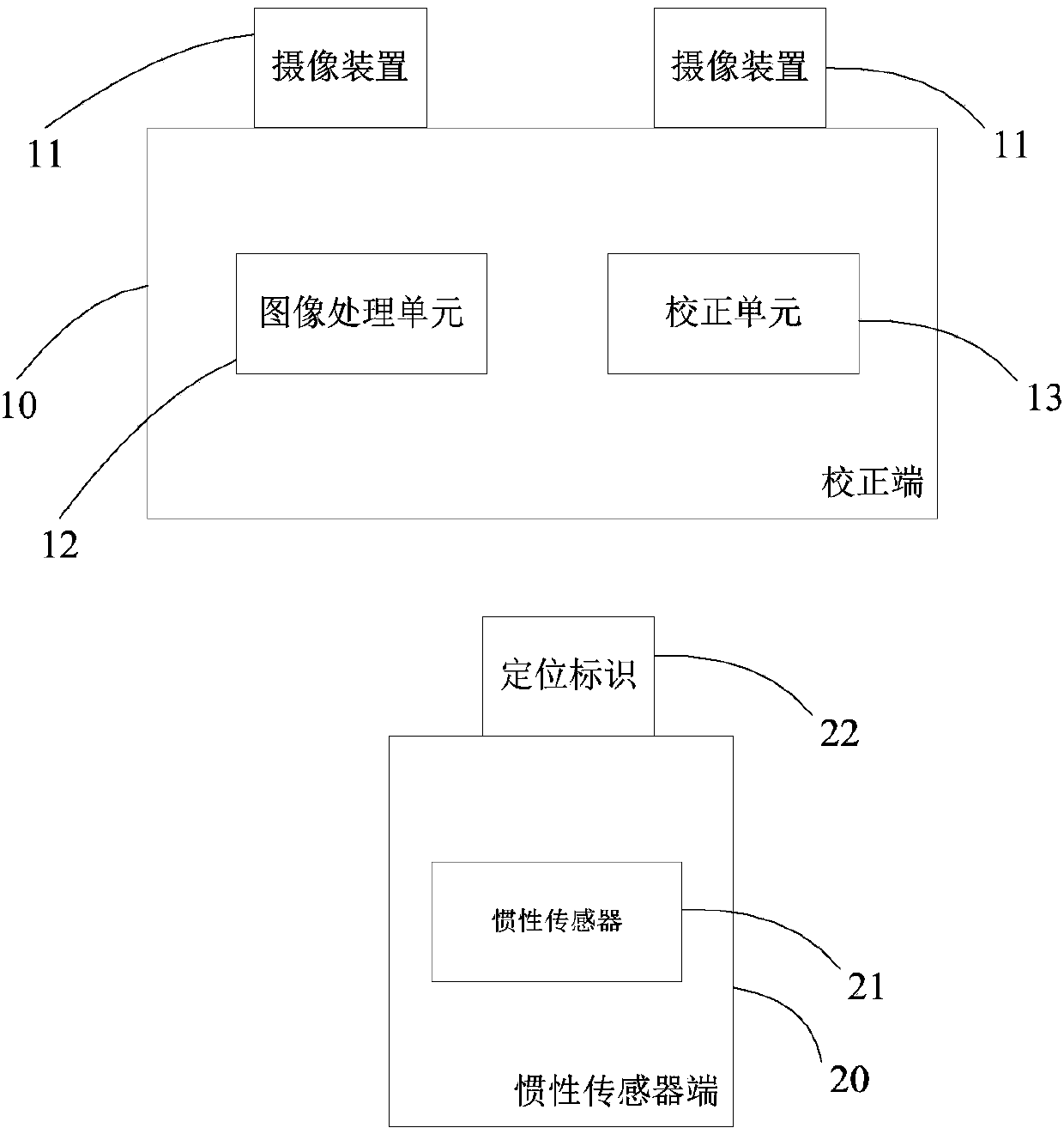
[0063] The inertial positioning method and system using vision-assisted correction of the present invention provide separate camera modules and positioning marks; wherein, the camera module is set at the calibration end and the positioning mark is set at the inertial sensor end, or the positioning mark is set at the correction end, And the camera module is set on the inertial sensor end. Then, use the camera module to photograph the positioning marks, and calculate the correction data according to the photographing results; use the correction data to correct the sensing data of the inertial sensor, which can realize the detection of the inertial sensor in the inertial positioning device with little power consumption. Error correcti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More