

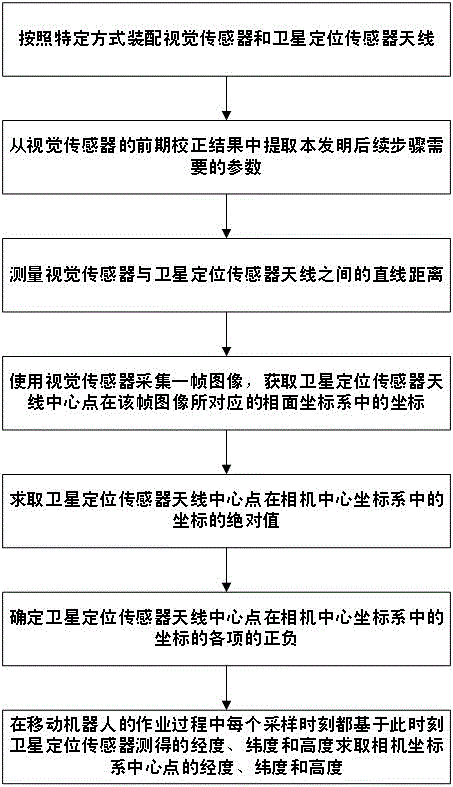
Joint calibration method of vision and satellite positioning sensor for robot navigation
A visual sensor, satellite positioning technology, applied in the field of integrated navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to better explain the problem, first declare the coordinate system involved in the present invention here:
[0024] The earth-centered earth-fixed coordinate system (represented by e in the present invention) is a right-handed coordinate system. The center of the earth is the origin, the x-axis points to the prime meridian, the y-axis points to 90 degrees east longitude, and the z-axis coincides with the earth's rotation axis and points to the North Pole. According to different expressions, the coordinates under e have two equivalent expressions: Cartesian coordinates, using (x e ,y e ,z e ) represents; geodetic coordinates, with longitude λ, latitude Height h said.
[0025] The local geographic coordinate system (represented by g in the present invention) is a right-handed coordinate system. The origin of the coordinate system is arbitrary, so whenever the local geographic coordinate system is expressed in the subsequent discussions of the present invent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More