

Real-time pose determination method, device and electronic equipment
A technology for determining the method and pose, applied in the image field, can solve problems such as map data drift and inaccurate pose information, and achieve the effect of improving accuracy and calibrating errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
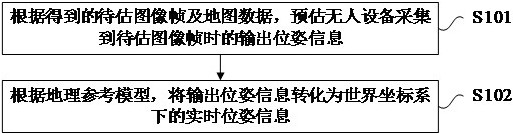
[0059] Please refer to figure 2 , figure 2 A real-time pose determination method provided by an embodiment of the present invention is shown. Such as figure 2 As shown, the above-mentioned real-time pose determination method may include the following steps:
[0060] Step S101, according to the obtained image frame to be estimated and the map data, estimate the output pose information when the unmanned device collects the image frame to be estimated.
[0061] The above-mentioned image frames to be estimated are images for evaluating the pose of the unmanned device. Each image frame to be estimated corresponds to a piece of positioning data. The image frame to be estimated and the corresponding positioning data have the same acquisition time point.
[0062] In some embodiments, the image frame to be estimated is an image frame generated after processing the image data collected by the unmanned device. In other words, the image frame to be estimated is an image frame indi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More