

A method of intelligent vehicle lateral control based on fuzzy sliding mode
A technology of intelligent vehicle and lateral control, applied in the field of intelligent vehicle lateral motion control and intelligent vehicle lateral motion control based on fuzzy sliding mode, which can solve the problems of long response time, short response time, and error prone to occur.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The specific embodiments of the present invention will be described in detail below in conjunction with the technical solutions and accompanying drawings.
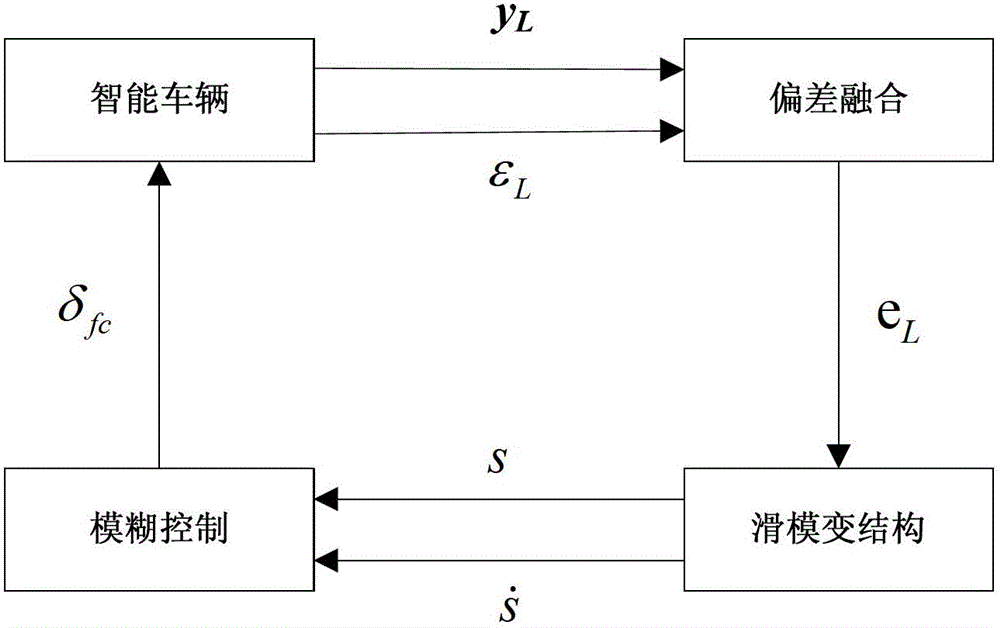
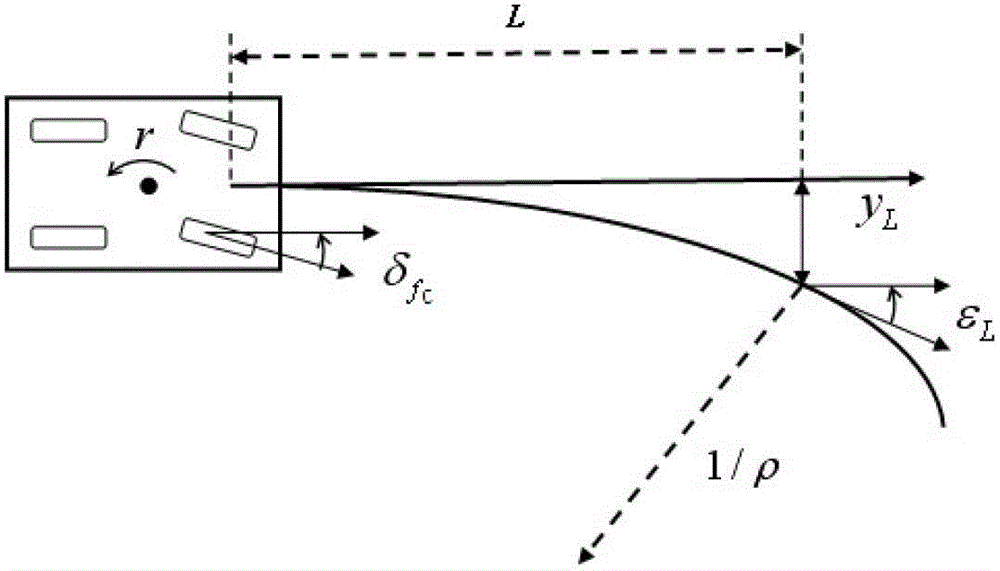
[0053] like figure 1 As shown in , the sliding mode switching function is designed by combining the lateral deviation and the azimuth deviation according to certain rules, and using the integrated deviation after fusion. The input of the fuzzy control adopts the sliding mode switching function and its differential, the front wheel angle As an output to control the lateral movement of the smart car.
[0054] The invention includes two parts: a design process of a lateral sliding mode control (Sliding-Mode Control) of an intelligent vehicle and a design process of a fuzzy sliding mode control (Fuzzy Sliding Mode Control).
[0055] A. The design process of intelligent vehicle lateral sliding mode control (Sliding-ModeControl) is:
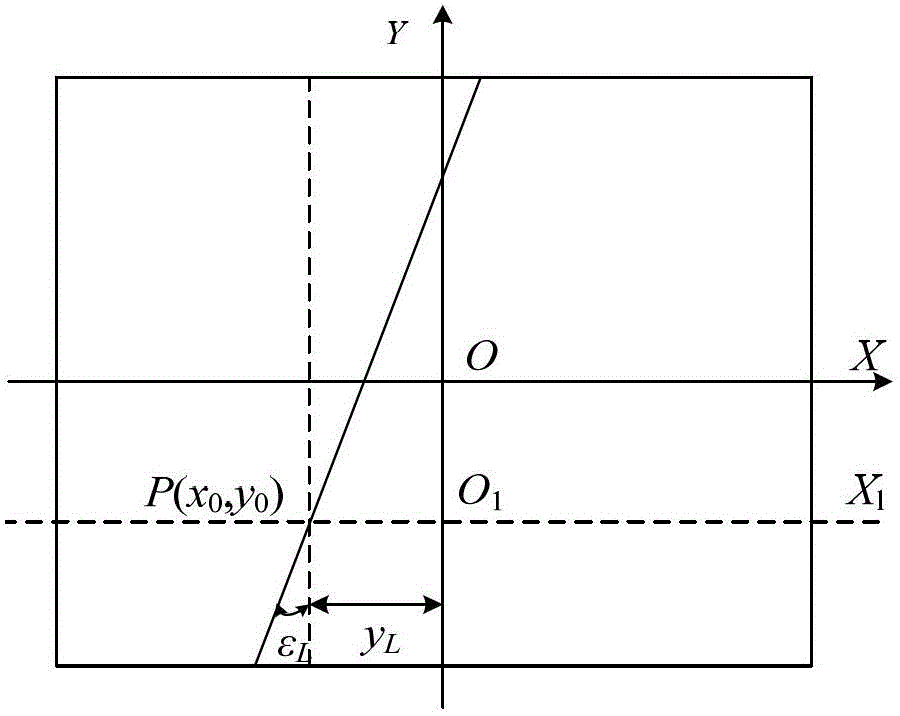
[0056] The first step to the lateral deviation and azimuth deviation As the sta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More