

Fuzzy formation and obstacle avoidance control method for multi-mobile-robot system
A mobile robot and control method technology, applied in two-dimensional position/channel control, adaptive control, general control system, etc., can solve problems such as deadlock, robots without too many sensors, and network topology that cannot be changed independently. Achieve the effect of avoiding control inaccuracy and easy realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, rather than limiting the protection scope of the present invention.
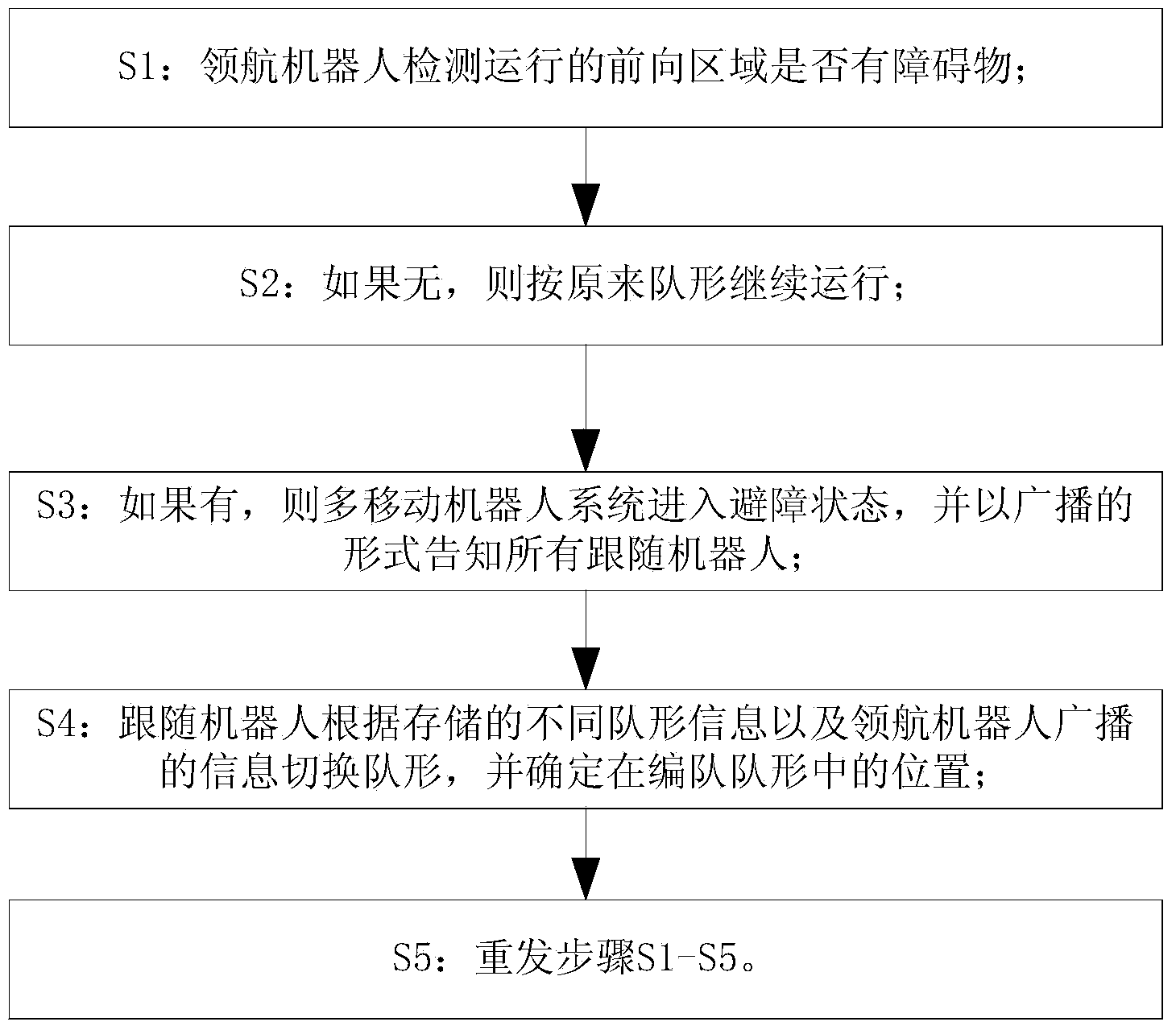
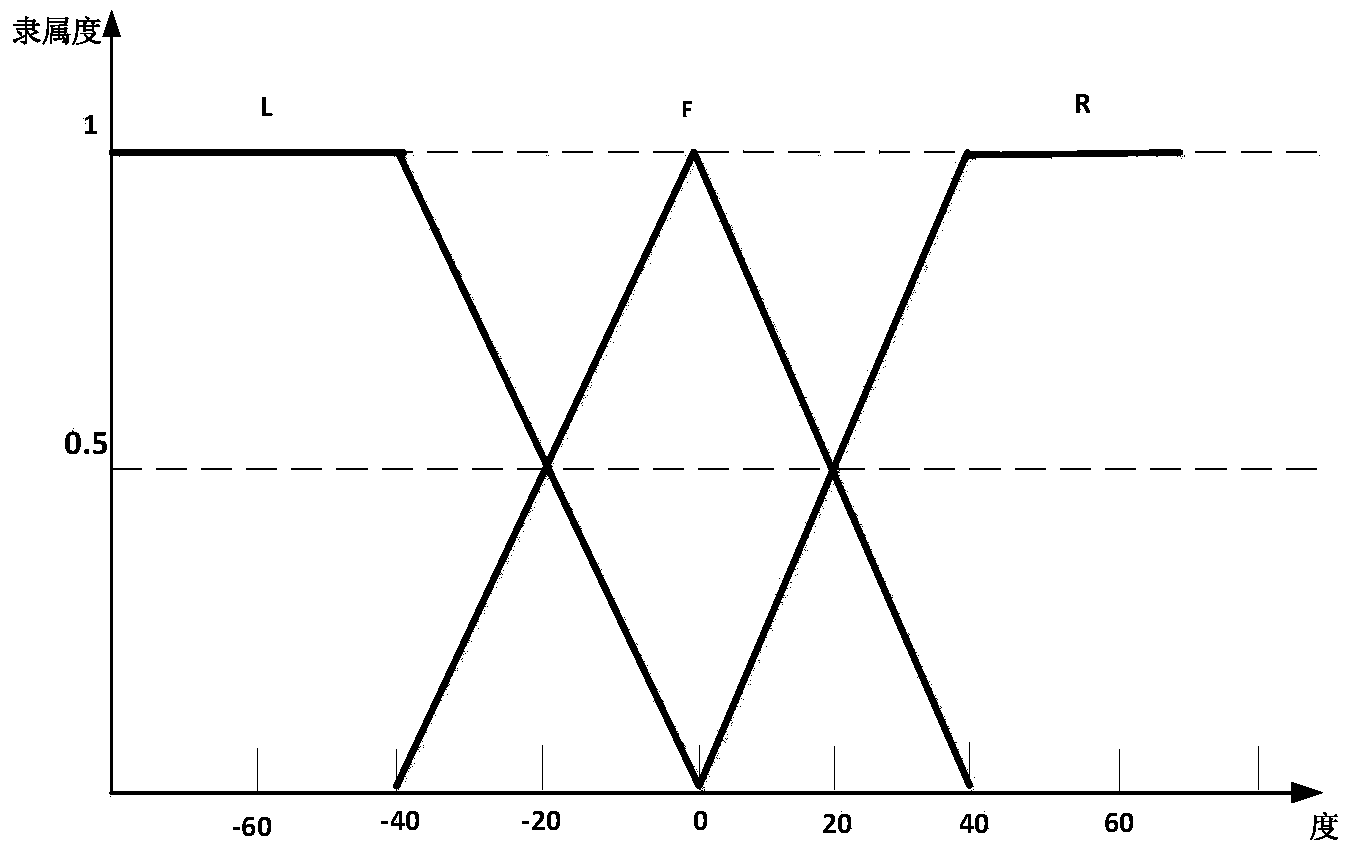
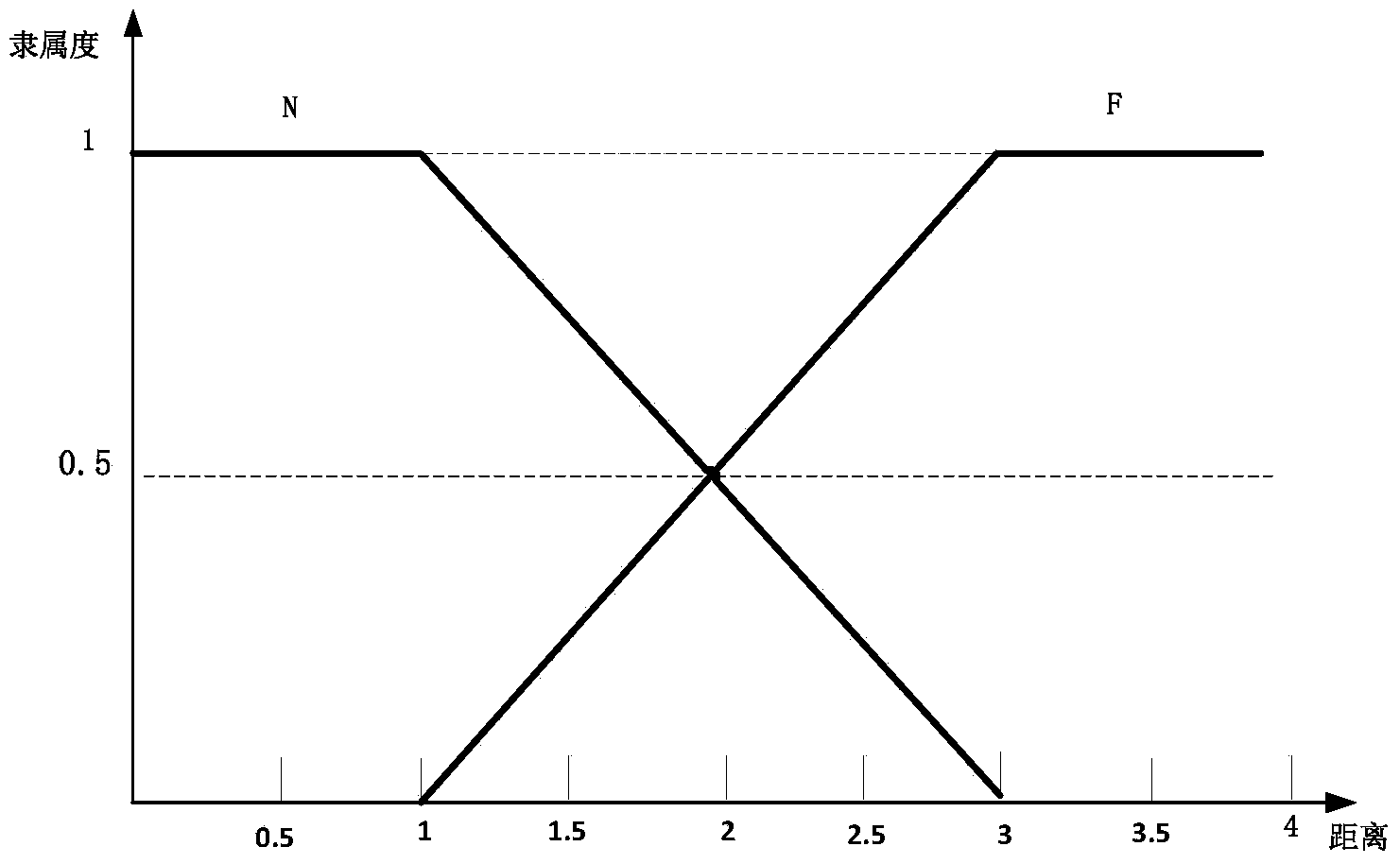
[0074] figure 1 A flow chart of a fuzzy formation and obstacle avoidance control method for a multi-mobile robot system provided by an embodiment of the present invention; figure 2 It is a schematic diagram of the membership function of the obstacle to the direction of the car provided by the embodiment of the present invention; image 3 A schematic diagram of the distance membership function of the obstacle to the car provided by the embodiment of the present invention; Figure 4 A schematic diagram of the output membership function of the pilot car provided by the embodiment of the present invention; Figure 5 A schematic diagram of the direction membership functio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More