

Ship positioning control method based on progressive guidance
A positioning control and ship technology, applied in two-dimensional position/channel control and other directions, can solve problems such as limited thrust, ship oscillation, and difficult control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention is described in more detail below in conjunction with accompanying drawing:
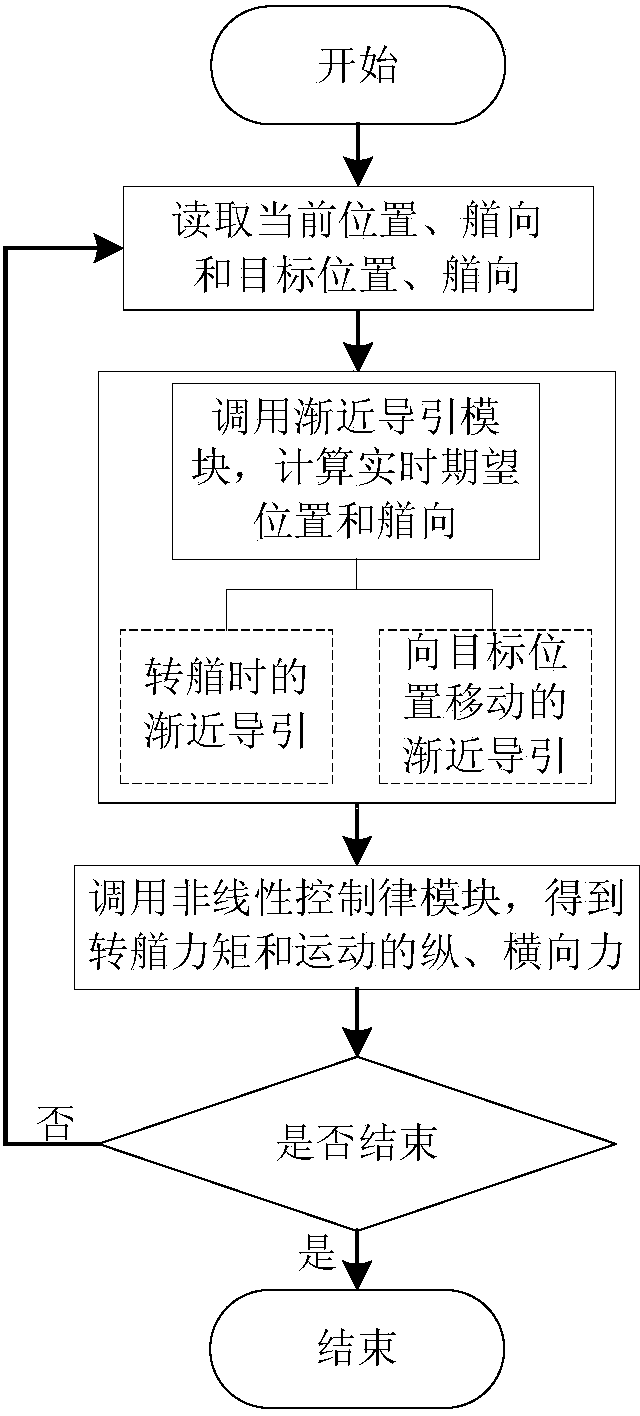
[0066] The ship's fixed-point positioning control method is divided into two modules to design: first design the ship's asymptotic guidance module, so that it can give the time-varying expected heading and expected position, and then design the corresponding nonlinear control law to make the ship turn to the target heading, and at the same time make the ship move to the target position, and finally realize the fixed-point positioning control of the ship. Its specific implementation steps are as follows:
[0067] (1) First, determine the target heading and target position of the fixed-point positioning of the ship according to the task requirements.
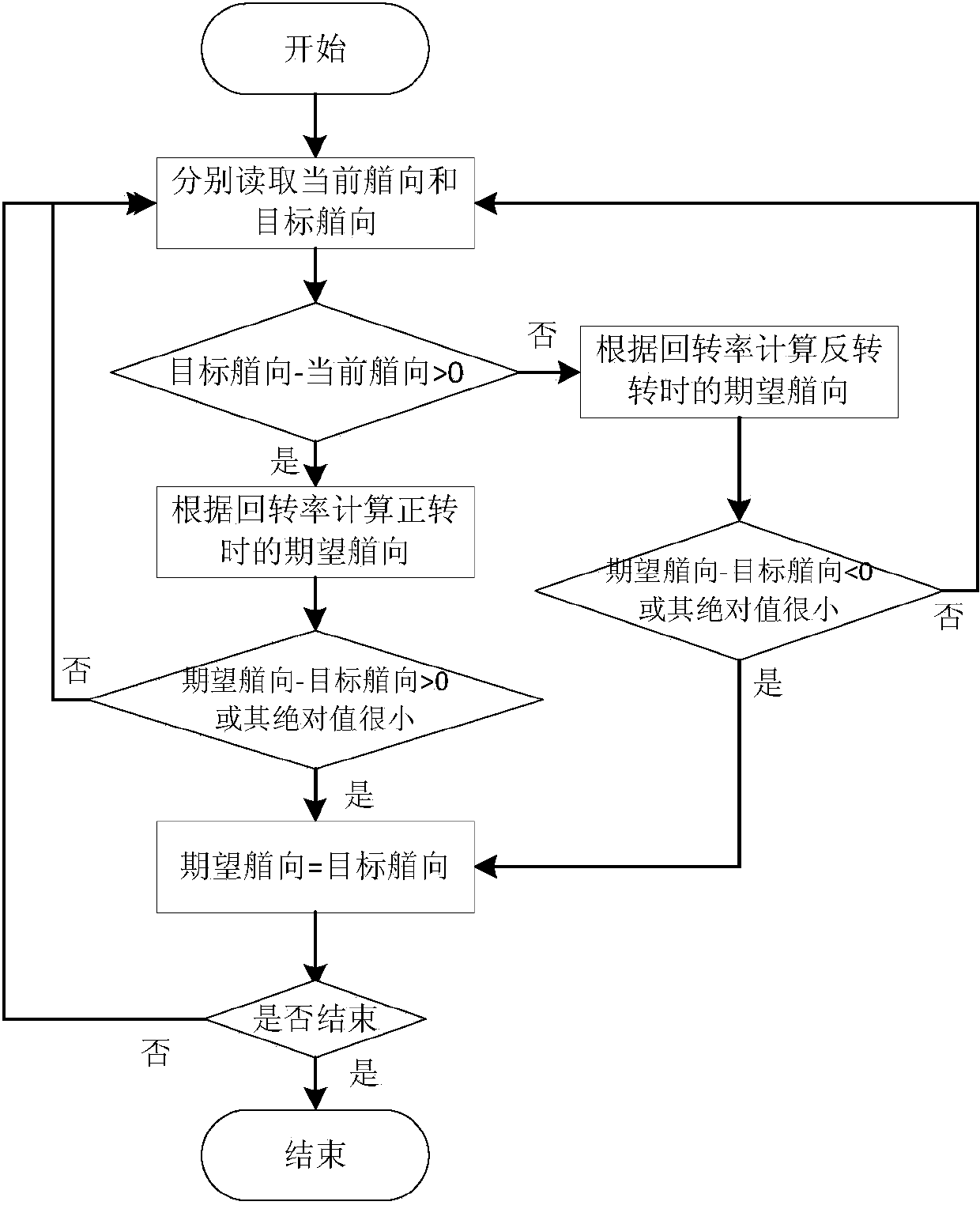
[0068] (2) Design the asymptotic guidance module when the ship turns the bow according to the target heading and the artificially set turning rate, so as to obtain the desired heading sequence.
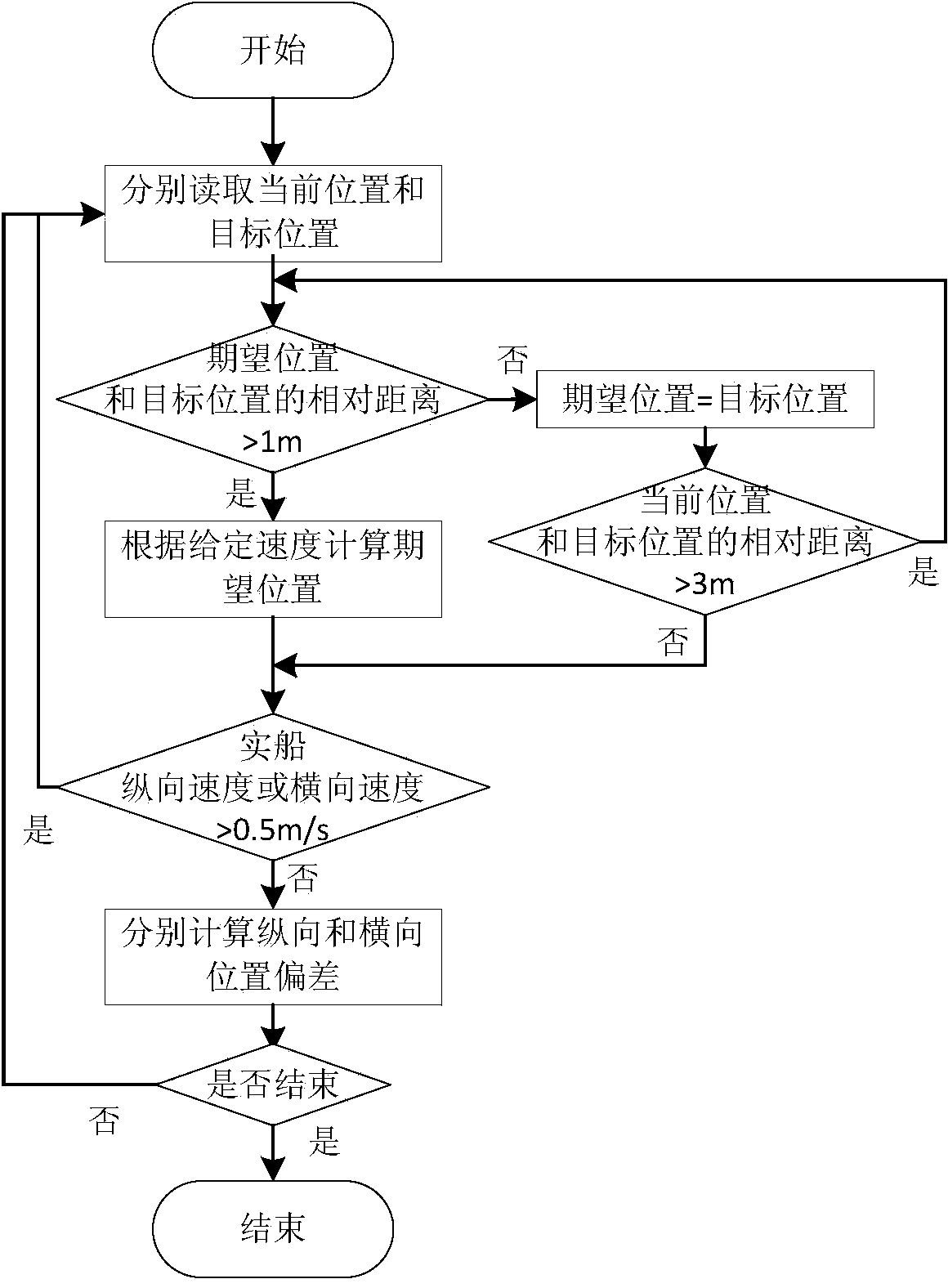
[0069] (3) Design the asymp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More