

Magic Wand Robot
A technology of robots and magic wands, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as lack of load capacity, limited use of snake-shaped robots, and inability of snake-shaped robots to carry loads, and achieve good stability and good performance. Effects of Terrain Adaptability and Surveillance Capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The following examples and attachments are combined Figure 1 to 3 The present invention will be further described.
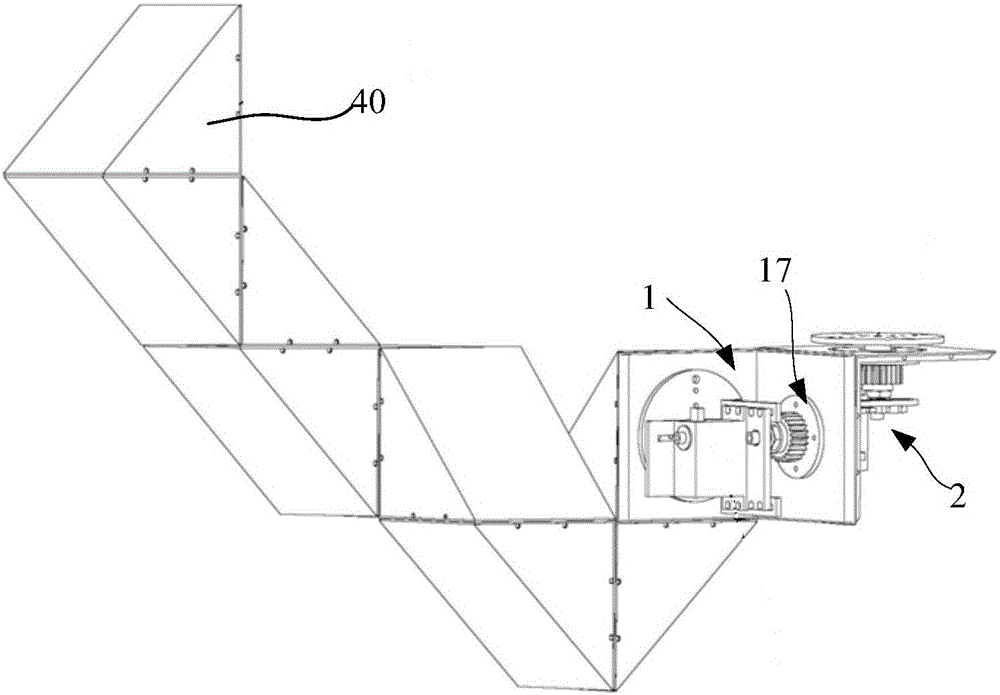
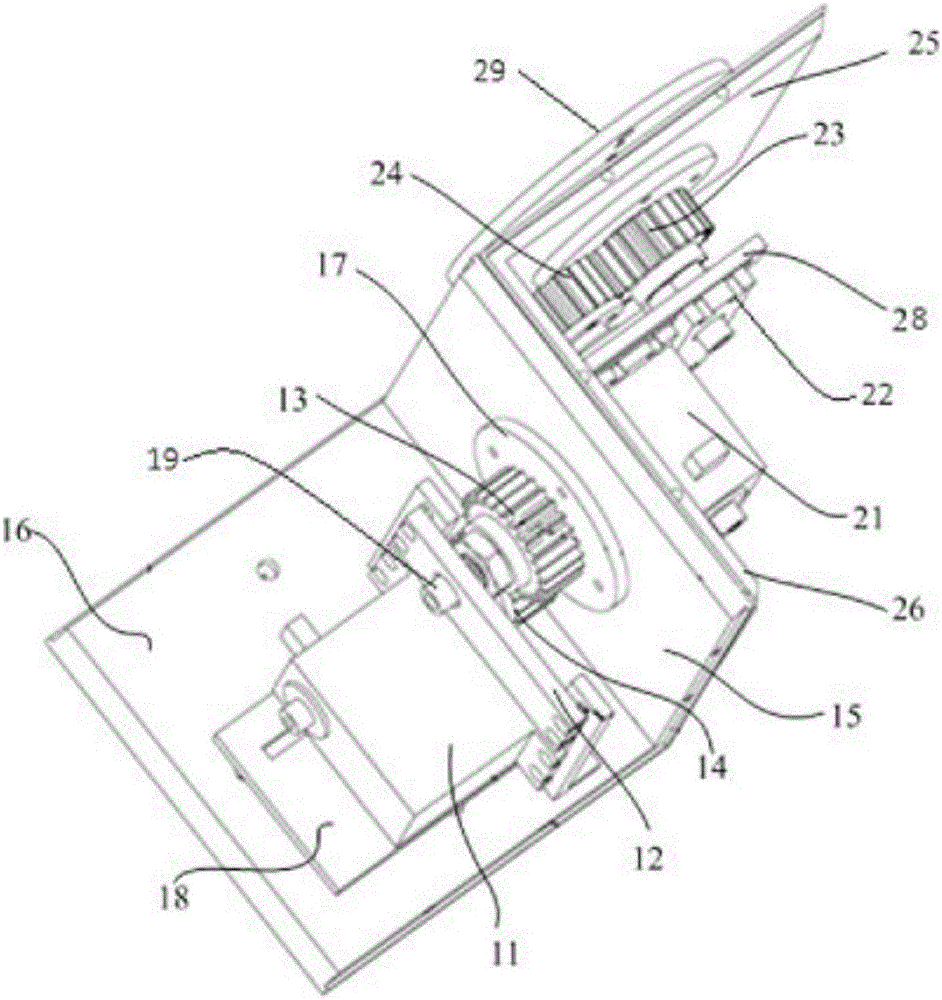
[0017] The present invention provides a magic wand robot, which includes multiple sets of drive units 40, and the drive units 40 are wedge-shaped and connected in series. figure 2 for figure 1 Part of the enlarged view, including figure 1 In the first drive unit 1 and the second drive unit 2, take the first drive unit 1 as an example. The first drive unit 1 includes a controller, a steering gear 11 that provides driving force, a bracket 18 that carries the steering gear 11, and a rudder The gears connected to the engine 11 and driven by the steering gear 11 to rotate, and the adjacent driving unit 40 can rotate under the driving of the second gear 13.
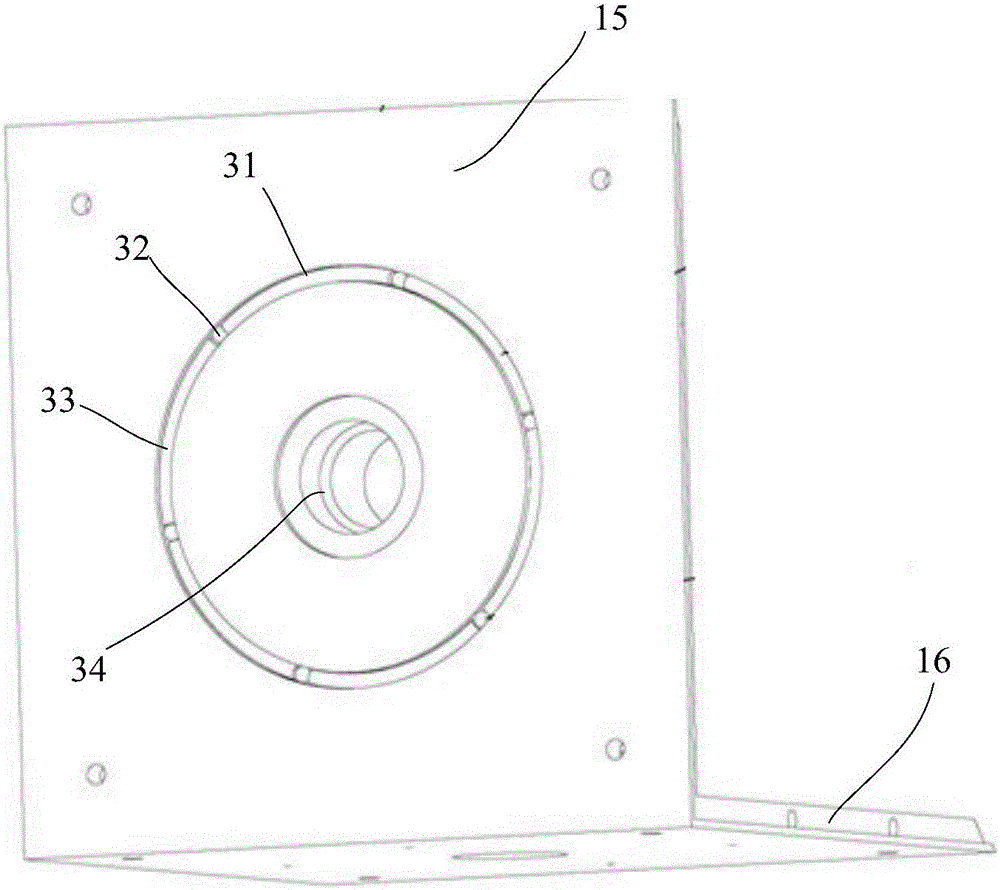
[0018] The first driving unit 1 also includes housings 15, 16 and housing covers. The controller, the steering gear 11, the central rotating body 19, the central rotating body fixing plate 12, the bracket 18 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More