

A compound split-layer self-recognition stacking structure robot
A technology for robots and walking robots, applied in the field of robotics, can solve problems such as unfavorable students' intuitive observation of the robot's controlled actions and effects, the inability to associate the control of two robots' actions, and the inability to know each other's motion information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
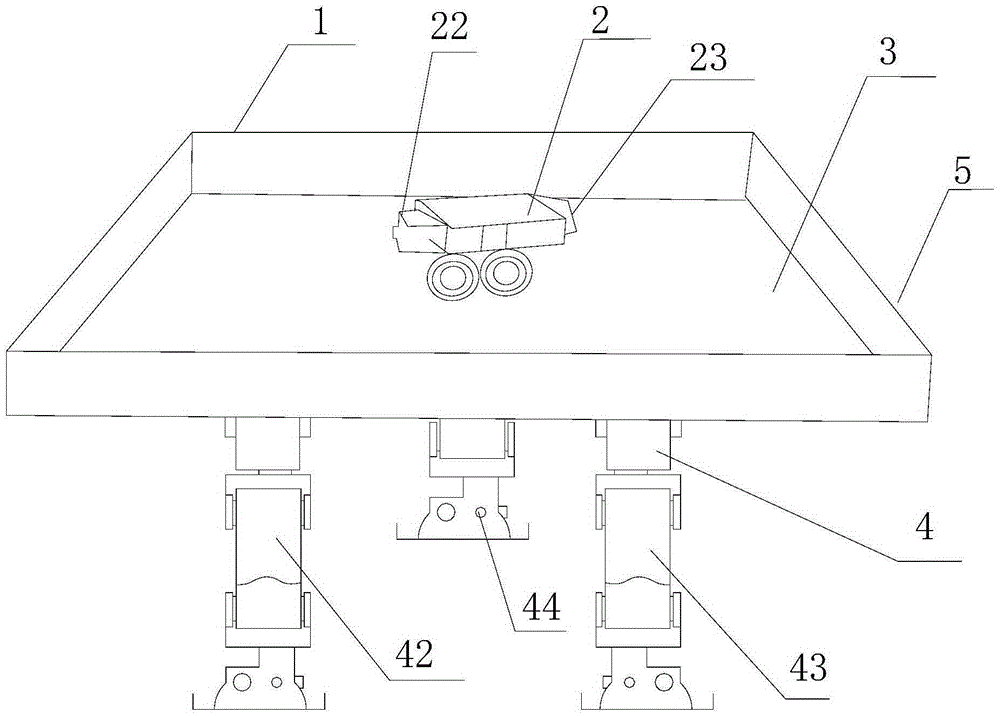
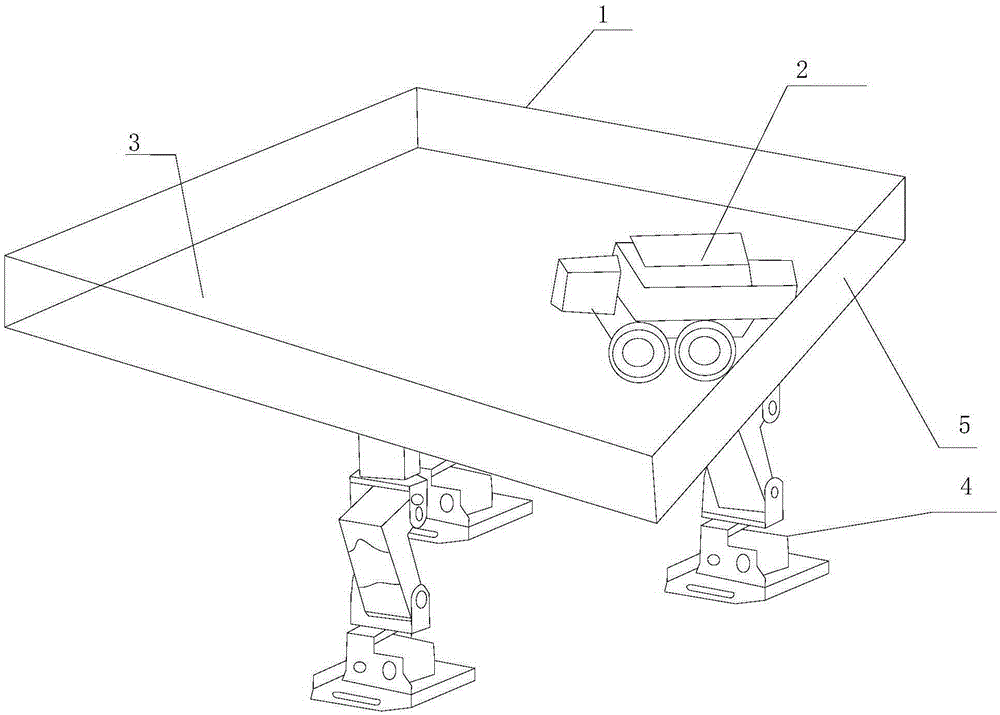
[0021] see figure 1 The first embodiment of the present invention provides a compound split-level self-recognition stacked structure robot 1, including a vehicle robot 2, a vehicle platform 3 and a walking robot 4; the vehicle robot 2 is arranged on the vehicle platform 3; comprising a baffle 5 surrounding the edge of said vehicle platform;
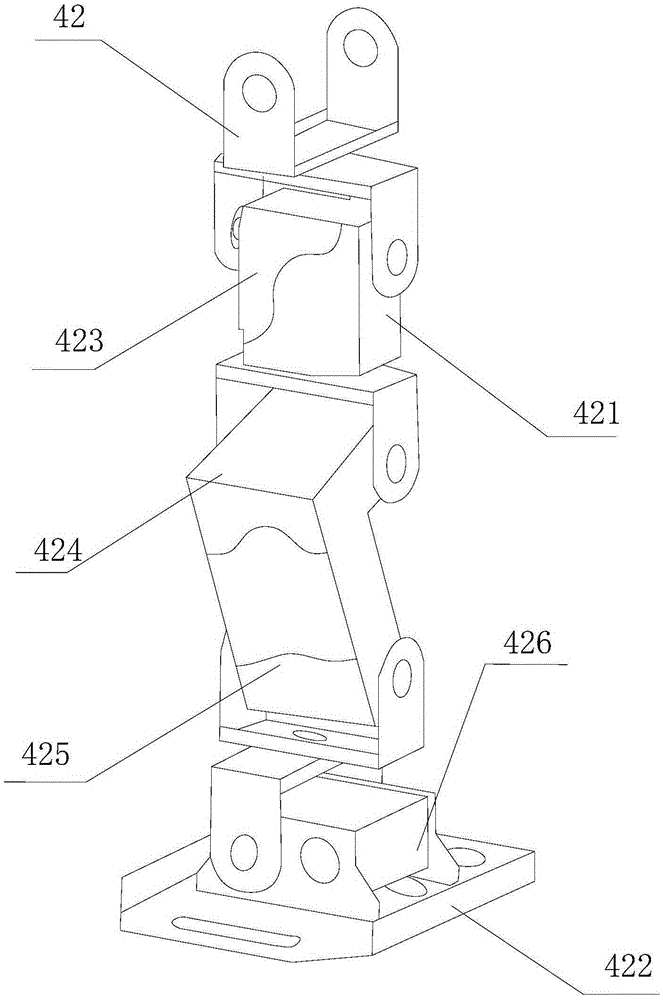
[0022] Described vehicle robot 2 comprises vehicle body, first microprocessor 21 (see also Figure 4 ) and a front distance sensor 22 and a rear distance sensor 23 electrically connected to the first microprocessor respectively; the front distance sensor and the rear distance sensor are respectively arranged at the front and rear of the vehicle body; Said walking robot 4 comprises a second microprocessor 41 (see also Figure 5 ) and the first front running device 42, the second front running device 43 and the rear running device 44 which are arranged at the bottom of the vehicle platform and are respectively electrically connected to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More