

Robot, control method thereof and robot system
A robot system and control method technology, applied in the sequence/logic controller in the direction of program control, electrical program control, electrical testing/monitoring, etc., can solve the problem of judging the cause and location of the fault, delaying the progress of the work plan, and the robot being stuck. and other issues to achieve a good user experience and ensure smooth implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] Robots can automatically walk and work in the working area, such as automatic lawn mowers, or automatic vacuum cleaners, which automatically walk on the lawn or the ground for mowing or vacuuming. Of course, the robot is not limited to automatic lawn mowers and automatic vacuum cleaners, and may also be other types of equipment, such as automatic spraying equipment or automatic monitoring equipment. Through robots, unattended operation of various tasks is realized.
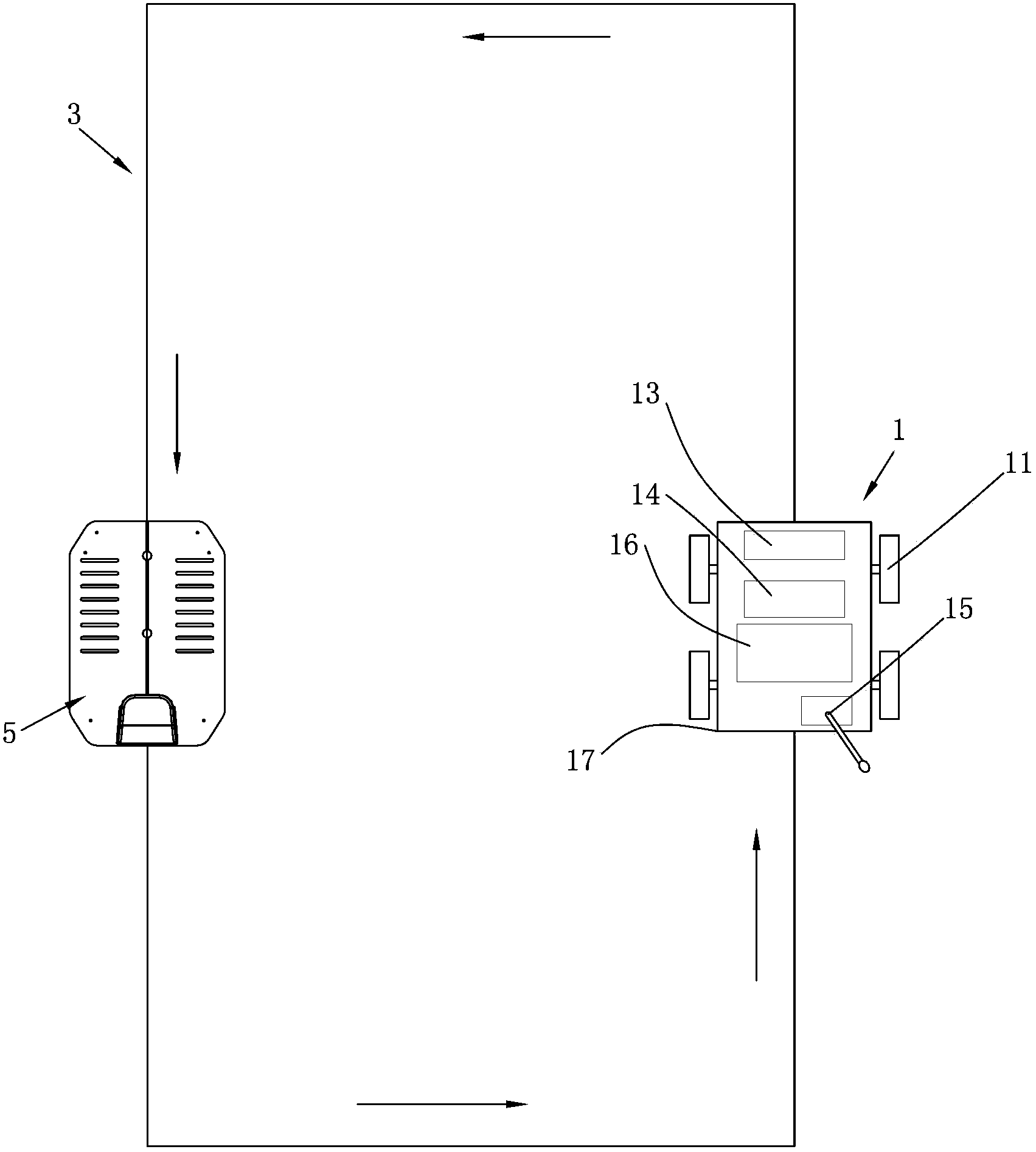
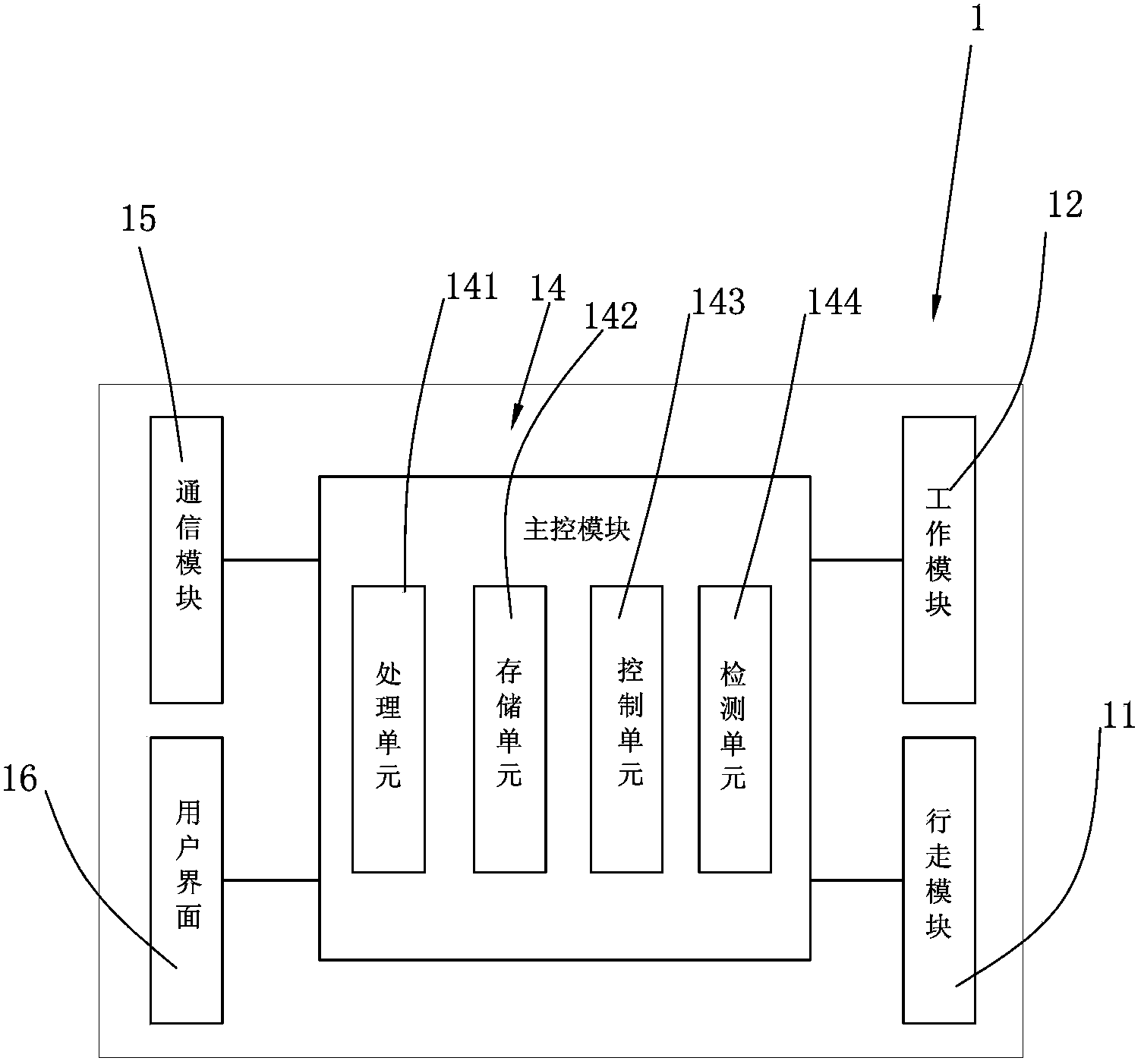
[0056] See Figure 1-Figure 2 , the machine 1 includes a walking module 11 , a working module 12 , an energy storage module 13 , a user interface 16 , a communication module 15 , a main control module 14 and a casing 17 for accommodating the above modules.
[0057] The working area is a closed area surrounded by artificially set boundary lines 3. The boundary line 3 can prevent the machine 1 from leaving the working area; the boundary line 3 can be walls, railings, etc.; it can also be energized wires or o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More