Automatic tracking material grasping mechanical hand device
An automatic tracking and manipulator technology, applied in manipulators, program-controlled manipulators, chucks, etc., can solve the problems of large space occupation and increased production line cost, and achieve the effect of improving adaptability, reducing costs, and overcoming multiple sets of grasping equipment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
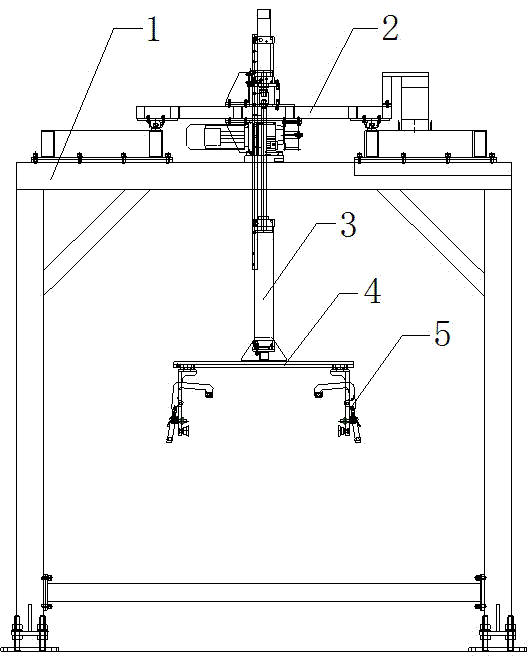
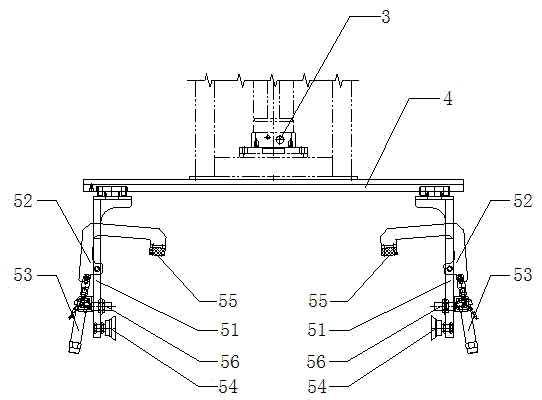
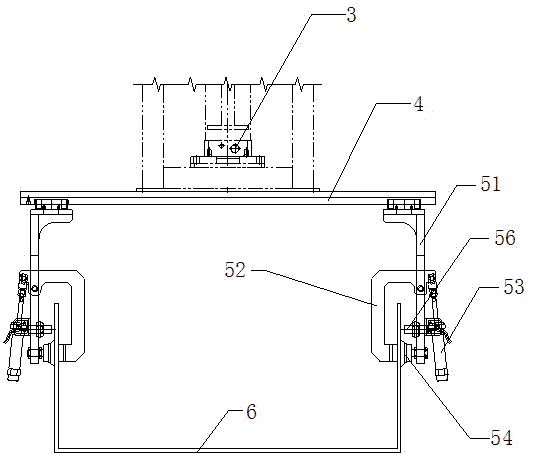
[0023] like Figure 1-5 As shown, an automatic tracking and grasping manipulator device includes a frame 1, a translation assembly 2 that moves horizontally and connects to the frame 1, a lift assembly 3 that moves up and down to connect the translation assembly 2, and a grasping assembly that connects the lift assembly 3. The assembly includes a mounting plate 4 and two sets of manipulators 5 arranged on the mounting plate 4. The two sets of manipulators 5 are arranged side by side, and the number of each set of manipulators 5 is two. The manipulators 5 in the same group are respectively located on both sides of the mounting plate 4. And relative setting, manipulator 5 moves and connects mounting plate 4, is provided with slide rail 41 on mounting plate 4, and manipulator 5 slides and connects slide rail 41, utilizes cylinder 42 to drive manipulator 5 to move back and forth on slide rail 41 simultaneously.
[0024] The translation assembly 2 is arranged on the top of the fram...
Embodiment 2
[0029] The rest are the same as the above-mentioned embodiments, the difference is that the manipulators 5 on the mounting plate 4 are one group, or other multiple groups, or grab two or more products at the same time, without limitation, depending on the specific production conditions .
[0030] Through the above technical solution, the beneficial effect of the technical solution of the present invention is: the setting of the translation component and the lifting component enables the grabbing component to automatically place the product to the designated position after grabbing the product; the grabbing component includes a mounting plate and is set on the installation There are at least one set of manipulators on the board, and the number of each set of manipulators is two. The manipulators in the same group are located on both sides of the mounting plate and are set opposite to each other. The manipulators move to connect the mounting plate so that the product is located i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More