

Active pendulum spherical robot
A spherical robot, active technology, applied in the field of robots, can solve the problems of insufficient safety control of the driving swing angle, the robot movement deviates from the predetermined trajectory, and the robot movement is out of control. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
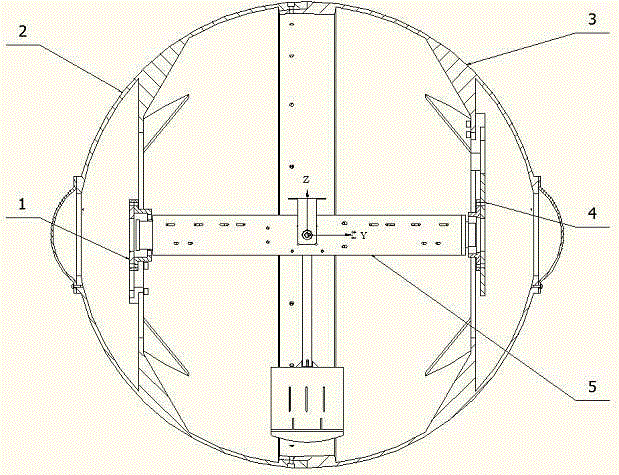
[0030] refer to Figure 1 to Figure 6 , the active pendulum spherical robot, which includes a spherical shell and a pendulum (5). The spherical shell is composed of a front hemispherical shell (2) and a rear hemispherical shell (3) by screwing together a spherical shell; in the inner cavity of the spherical shell, a front fixing strip (1) and a The single pendulum (5) is installed on the rear fixing bar (4); the single pendulum (5) is coaxially installed with a long-axis motor (9) and a short-axis motor (34) in an inner frame (6). , the long-axis motor (9) is directly connected to drive the front half-shell spherical shell to rotate around the central axis Y of the inner frame (6), and the short-axis motor (34) drives a drive pendulum (18) through the transmission mechanism to be perpendicular to the axis Y The X axis rotates to realize the spherical robot walking stably in all directions.
Embodiment 2
[0032] This embodiment is basically the same as the first embodiment, and the special features are as follows:
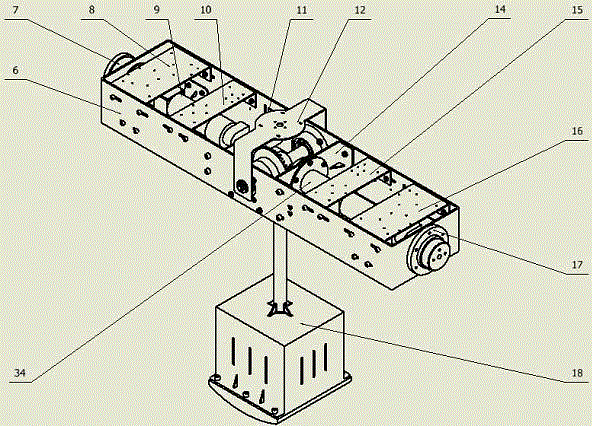
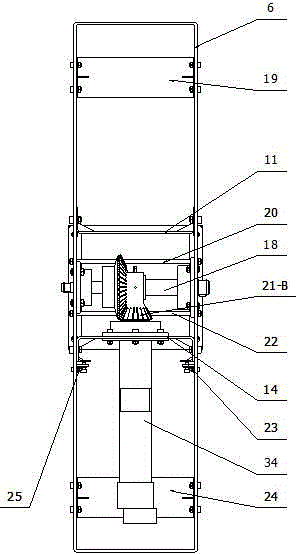
[0033] The inner frame (6) is a symmetrically distributed U-shaped weight-reducing positioning slot, and the narrow-frame expansion brackets (10, 15), the wide-frame expansion brackets (8, 16), and the short axis are mounted on the U-shaped slot by screws. The motor support (11) and the torque bearing plate (19, 24); the middle of the inner frame (6) is rotatably installed with a short shaft ( 28).
[0034] 3. The active pendulum spherical robot according to claim 2, wherein the short axis (28) and a pan / tilt bracket (12) pass through a key (26-B) and keys (26-C) Fixed connection, the short axis (28) coincides with the center line of the pan-tilt bracket (12), and performs coaxial synchronous rotation, and the detection and data acquisition equipment is fixed on the pan-tilt bracket (12).
[0035] The short-axis motor group (14) is installed in the evenly ...
Embodiment 3
[0040] like figure 1 As shown, the active single pendulum spherical robot comprises a spherical shell and a single pendulum (5), the single pendulum (5) is installed in the spherical shell; the single pendulum (5) includes: an inner frame (6), a narrow, Wide frame extension brackets (8, 10, 15, 16), front and rear shell pendulum couplings (7, 17), torque bearing plates (19, 24), short-axis motor support (11) drive pendulum (18), The pan / tilt bracket (12), the short-axis motor unit (14), the positioning and adjusting devices (23, 25) of the short-axis motor unit and the limit shafts (20, 22); the inner frame (6) is connected to a front shell through a bearing A swing link (7) and a rear shell swing link (17), the front shell swing link (7) and the rear shell swing link (17) pass through the front fixing strip (1) and the rear fixing strip (4) ) is fixedly connected to the spherical shell, so that the pendulum (5) can rotate relative to the spherical shell around the long a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More