

Elastic manipulator with part protection structure
A technology of manipulators and parts, which is applied in the field of manipulators, can solve the problems of large force and damage of parts to be grasped, and achieve the effect of improving the efficiency of grasping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
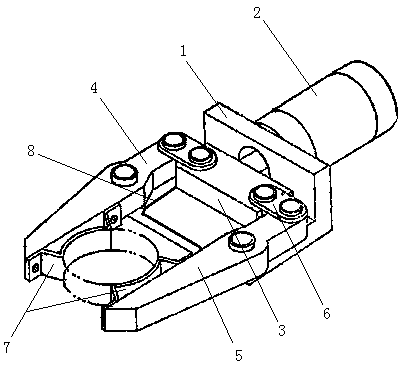
[0011] like figure 1 As shown, an elastic manipulator with a protective part structure includes a base 1, a cylinder 2, a drive block 3, a first gripper 4, a second gripper 5 and a connecting rod 6, and the cylinder 2 is arranged on the base 1. The first claw 4 and the second claw 5 are located on both sides of the drive block 3, and both middle parts are hinged on the base 1, and the first claw 4 and the second claw 5 are connected to the drive block at one end near the cylinder 2 3 is hinged through the connecting rod 6, and the distance between the hinged ends of the first claw 4 and the second claw 5 is the largest limit position where the drive block 3 moves, and the drive block 3 is connected to the piston rod of the cylinder 2. Spring plates 7 are respectively arranged at the relative positions of the gripping sides of the gripper 4 and the second gripper 5, and the two ends of the spring gripper 7 are fixed, and there is a gap between the gripping part in the middle an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More