

A kind of mechanical finger and mechanical hand
A technology of mechanical fingers and manipulators, applied in the field of robotics, can solve problems such as deformation or damage of items, and achieve the effect of conversion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
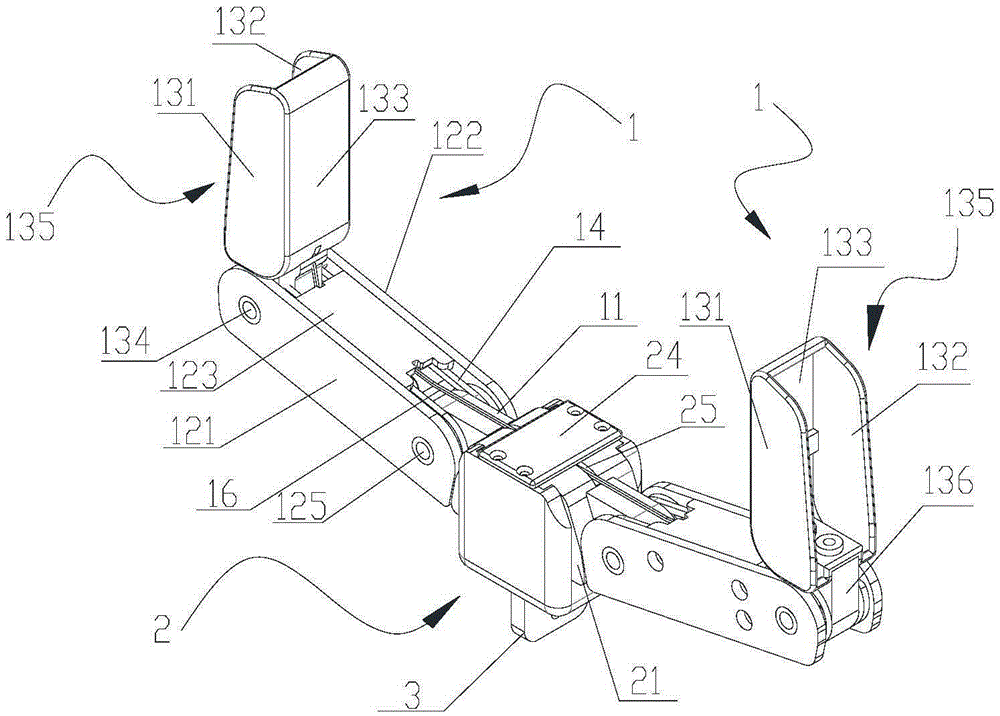
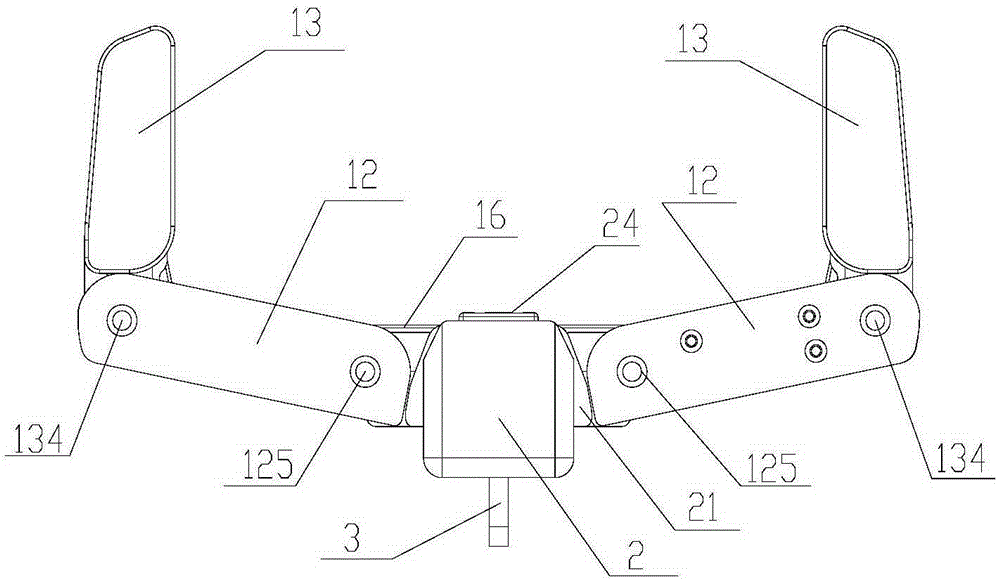
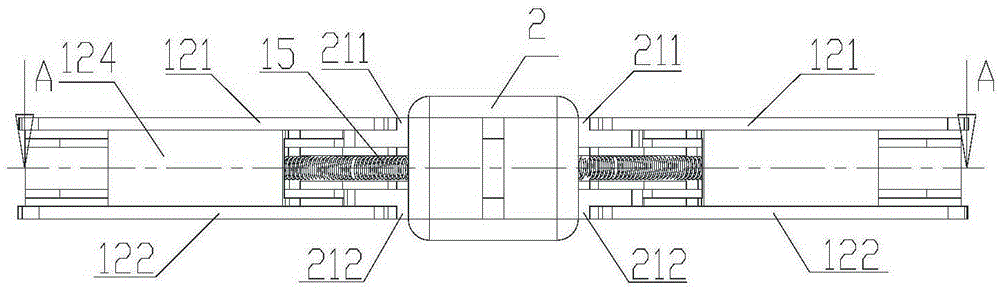
[0049] figure 1It is a schematic diagram of the three-dimensional structure of the first embodiment of the manipulator with the manipulator 1 of the present invention, figure 2 for figure 1 Front view of the manipulator in , image 3 for figure 1 The bottom view of the manipulator in , Figure 4 for image 3 The cross-sectional view of the manipulator in A-A line, Figure 5 yes figure 1 A partial cross-sectional view of the manipulator in . Such as Figure 1 to Figure 5 As shown, the mechanical finger 1 of the present invention includes a first connecting member 11 , a first finger segment 12 , a second finger segment 13 , a first elastic member 14 , a second elastic member 15 and a pull wire 16 . Wherein the first connecting piece 11 is used to fix the mechanical finger 1 on the fixing device, one end of the first connecting piece 11 is connected with the fixing device fixing the mechanical finger 1, the specific way of connection will be described in detail later, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More