

Multi-platform crawling wind turbine tower operation robot
A technology of working robots and wind turbines, which is applied in the field of robots, can solve the problems of incoherent movements, interference and collision, and the large volume of the scaling mechanism, and achieve the effect of simple overall structure and solving the incoherence of climbing and rotating movements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
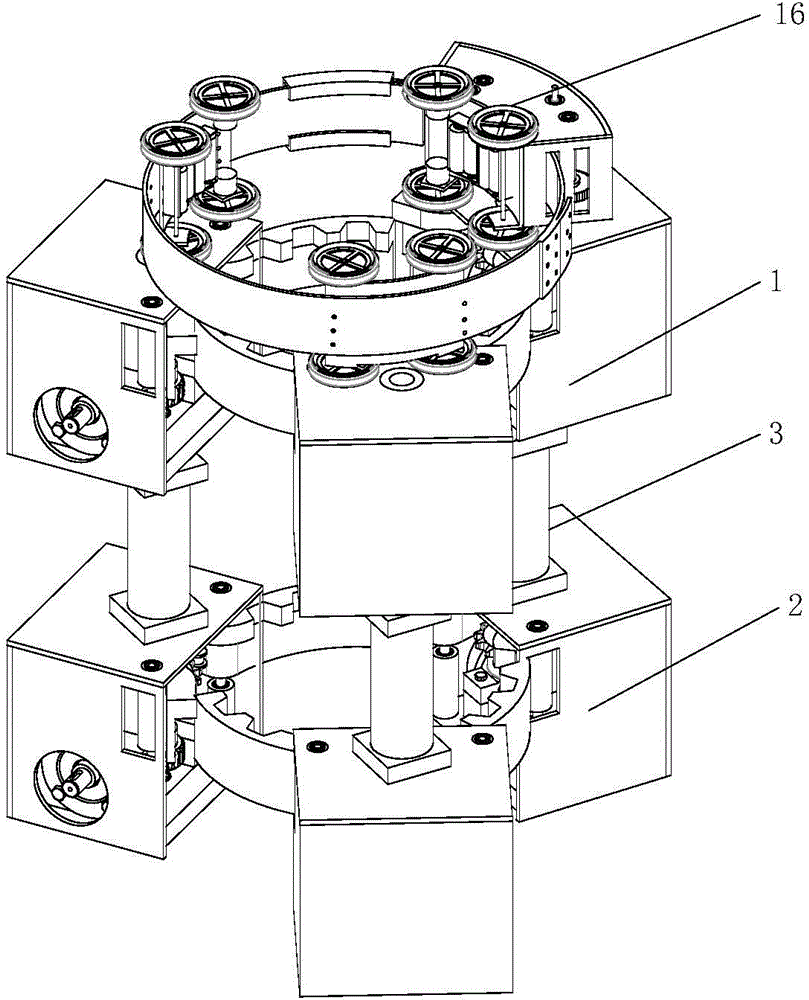
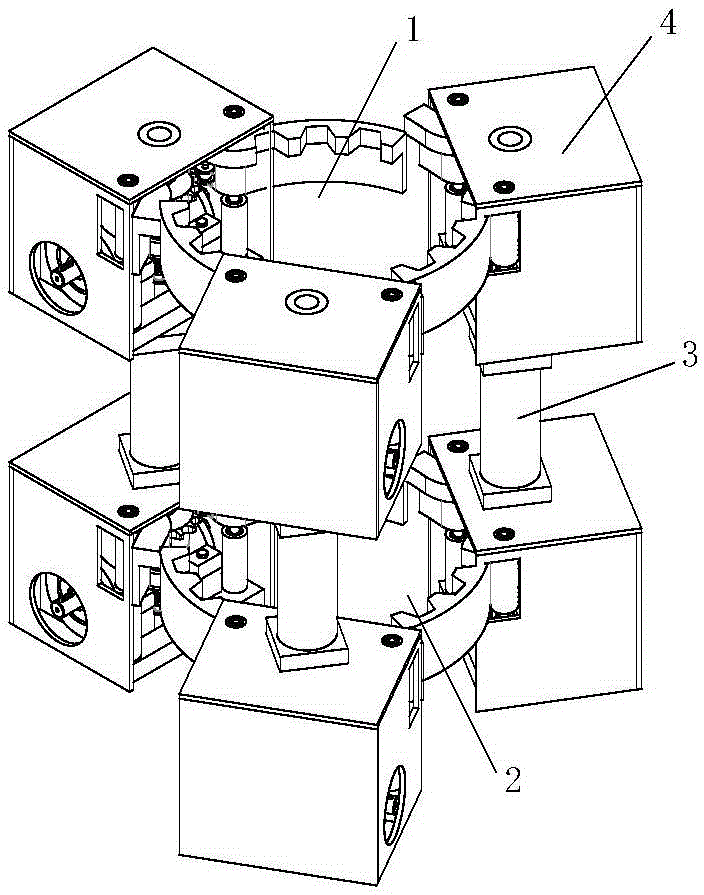
[0024] see Figure 1 to Figure 7 , a multi-platform crawling wind turbine tower operation robot, comprising first and second two-layer lifting platforms and a third-layer rotating platform 16, the third-layer rotating platform 16 is placed on the second-layer lifting platform 1 top surface.
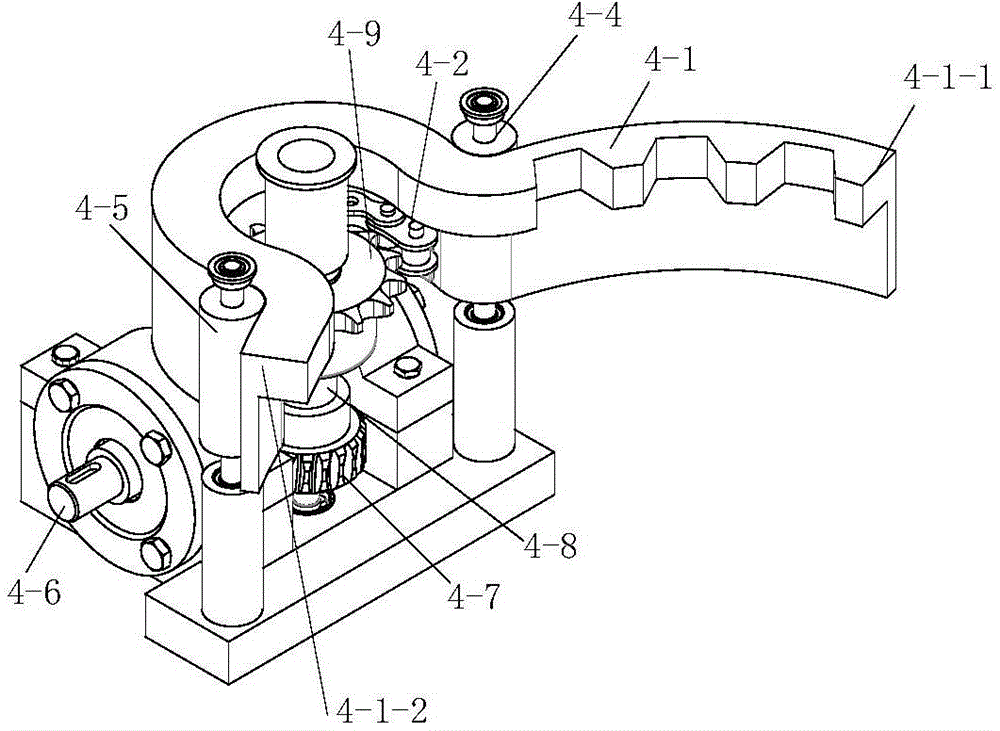
[0025] The first layer of lifting platform 2 includes at least three lifting units 4 evenly distributed around the tower, and each of the lifting units 4 includes an exclusive packing box, a synchronous belt 4-1 surrounding the tower and a double-sided curved plate chain 4 -2 and the synchronous belt scaling drive device, the synchronous belt scaling drive device is arranged in the exclusive packing box; the tooth shape of the synchronous belt 4-1 is se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More