

Method for automatically registering cloud data of laser dots based on three-dimensional line characters
A laser point cloud data, automatic registration technology, applied in image data processing, instrumentation, calculation and other directions, can solve the problems of incomplete data, easy to be affected by noise, difficult to obtain ideal results using ICP, etc. The effect of resolution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
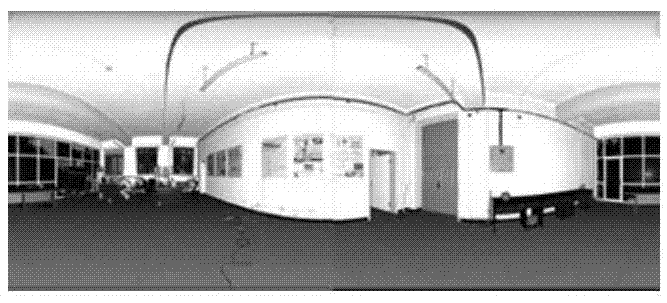
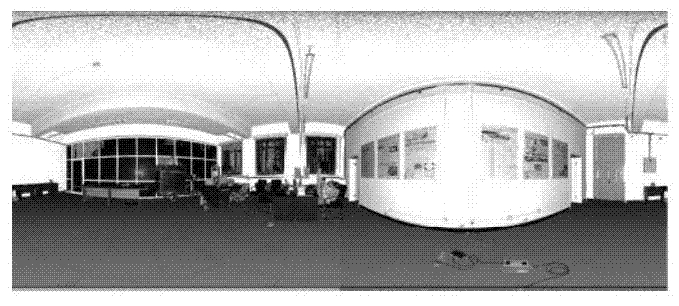
[0082] In order to verify the effectiveness of the algorithm of the present invention, a Leica HDS6000 scanner was used to scan an indoor building to obtain test data. The main technical parameters of this type of scanner are: scanning speed 500,000 points / s, scanning range 360°x310°, single point The accuracy of measurement is 3mm (50m distance). Figure 2 shows the intensity raster image of the data obtained from the two stations. The left picture is the left station data (reference station), and the right picture is the right station data (the station to be registered).
[0083] The method of the present invention is used to extract boundary points, and cluster to delete smaller sets. The results are shown in Figure 3(a) and Figure 3(b). Then in each cluster, the RANSAC method is used to detect the line equation. In this process, the point-to-line threshold is set to 0.005m, the maximum number of iterations is 1000, and the minimum number of consistent sets is 50. After obt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More