

Space teleoperation method
A remote operation and space technology, applied in the direction of instruments, manipulators, control/regulation systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
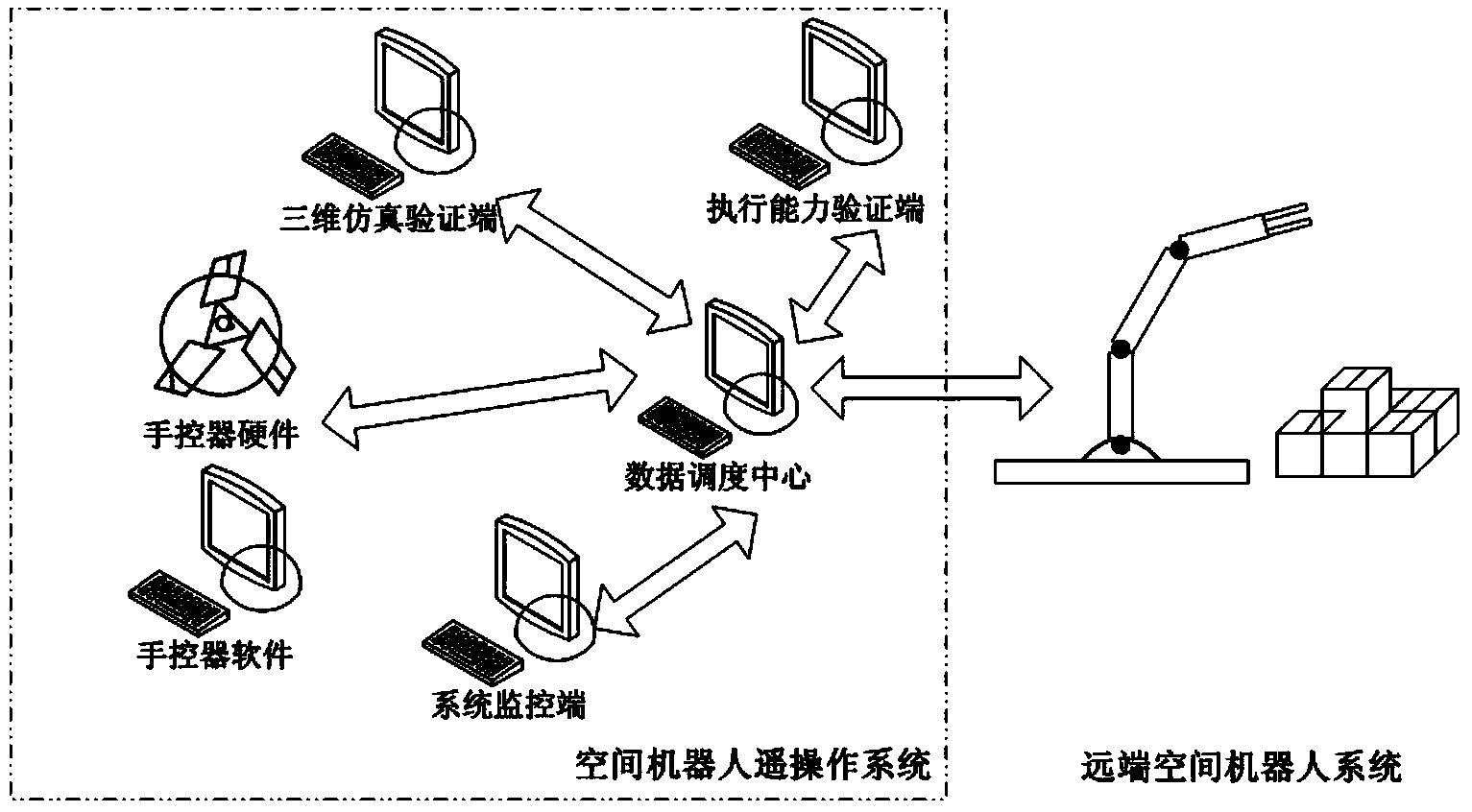
[0066] Step 1: Establish a space teleoperation verification terminal
[0067] Adopt Open Scene Graph to set up the three-dimensional model of space robot; According to robot dynamic parameters, adopt Lagrangian method to set up dynamics mathematical model, according to the actual control parameter of space robot, set up simulation model, the establishment method is known technology in the art;
[0068] In the space teleoperation system, the structure is the same as the control device of the space robot controller, and the input and output interfaces of the control device are consistent with the space robot.
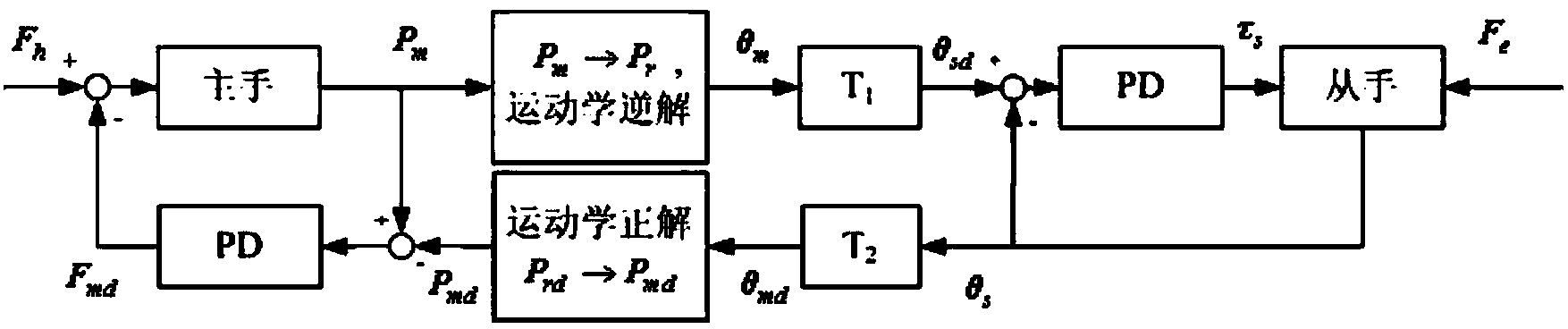
[0069] Step 2: Use the hand controller to generate teleoperation commands
[0070] The force feedback device Force Dimension Delta3 is selected as the main hand, and the bilateral control algorithm adopted is bilateral PD control. The operator operates the main hand movement, and the device can obtain the three-dimensional position information P of the end of the device ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More