

Ship motion control system with control input restraints considered
A control system and ship motion technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of not considering the saturation characteristics and dead zone characteristics of the actuator, and achieve the effect of improving control accuracy, simple form, and enhancing suppression ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention is described in detail below:
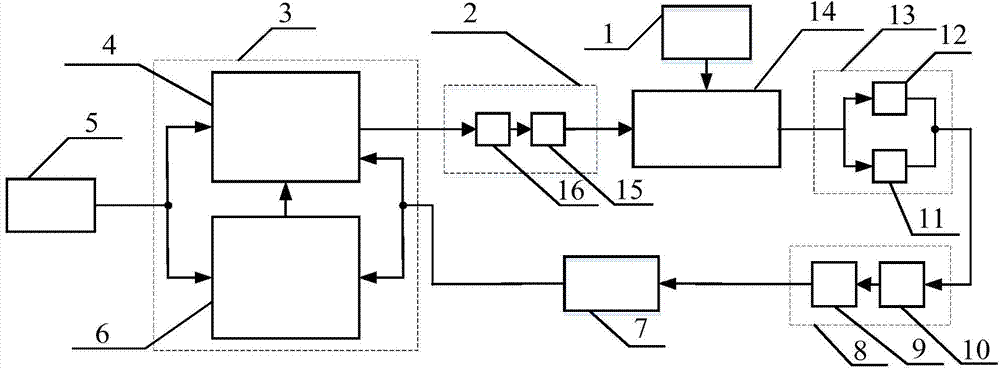
[0024] Such as figure 1 As shown, the filter backstepping ship motion control system based on the adaptive neural network estimator of the present invention includes a guidance system 5, a control system 3, a control input compensation system 2, a sensor system, 13, a differential synchronous Embryo converter 7, data processing system 8. The pose sensor 12 and the speed sensor 11 in the sensor system 13 respectively collect the actual pose and speed information of the ship, and package them together and transmit them to the data processing system 8. After being processed by the data fusion system 10 and the filtering system 9, the obtained 3's ship pose and velocity; the processed data is transformed by Diffeomorphic transformer 7 to obtain new state variables for backstepping design; these new variables are passed to the filtering backstepping controller 4 and the control system 3 The adaptive neural network estim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More