

Modularization sheep foot simulation mechanical foot device
A mechanical foot, modular technology, applied in the field of mechanical design, can solve problems such as walking difficulties, and achieve the effects of reliable operation, increased friction, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
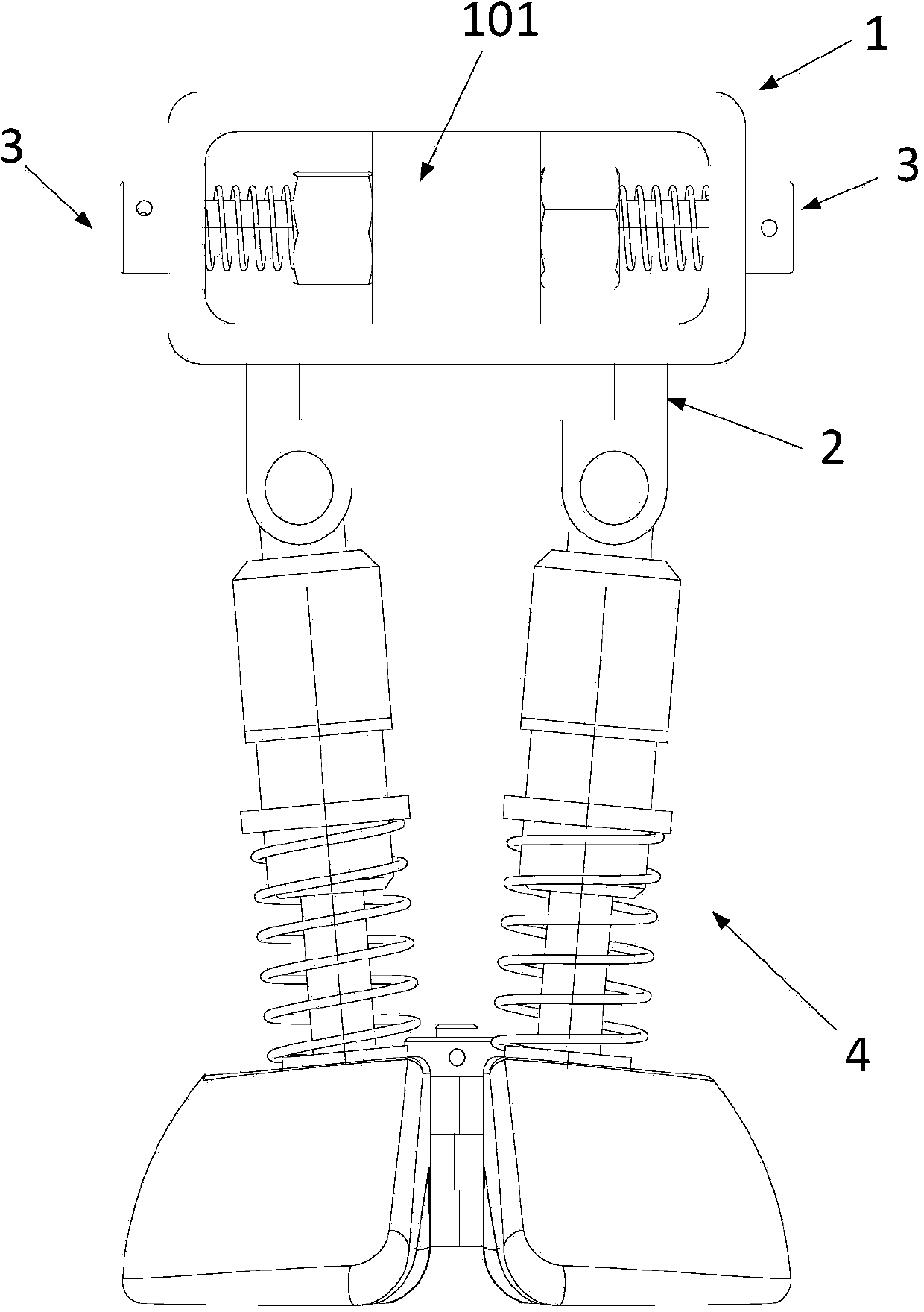
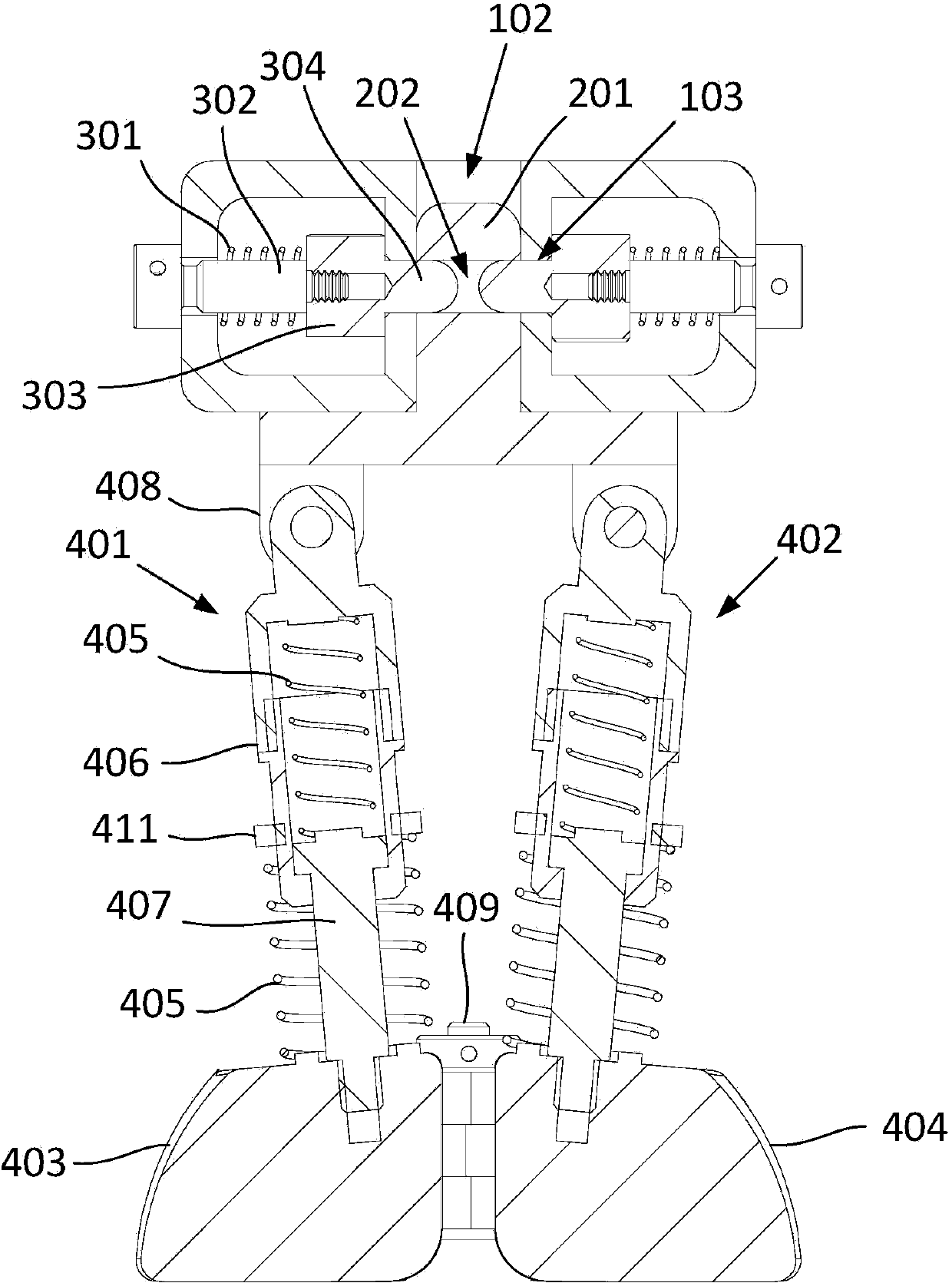
[0026] A modular imitation sheep foot mechanical foot device, including an interface shell 1, a foot mounting plate 2, a plug-in mechanism 3 and a foot mechanism 4, such as figure 1 shown. Wherein, the upper end of the interface shell 1 is used to connect with the leg of the robot, and the lower end is connected to the foot mounting plate 2 ; the lower surface of the foot mounting plate 2 is used to install the foot mechanism 4 . The relative positioning between the above-mentioned interface shell 1 and the foot mounting plate 2 is realized through the plug-in mechanism 3 with the foot mounting plate 2, and then the relative positioning between the foot mechanism 4 and the interface shell 1 is realized; and the plug-in mechanism 3 and the interface There is no fixed connection between the shell 1 and the foot mounting plate 2, which can realize the quick disassembly and installation between the interface shell 1 and the foot mounting plate 2, which is convenient for the robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More