

ICCP algorithm-based gravity matching aided inertial navigation method
An inertial navigation and gravity matching technology, applied in the field of inertial navigation, can solve problems such as slow speed, long time-consuming inertial navigation, and large time-consuming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0023] The invention provides a gravity matching assisted inertial navigation method based on the improved ICCP algorithm, which improves the traditional ICCP algorithm.
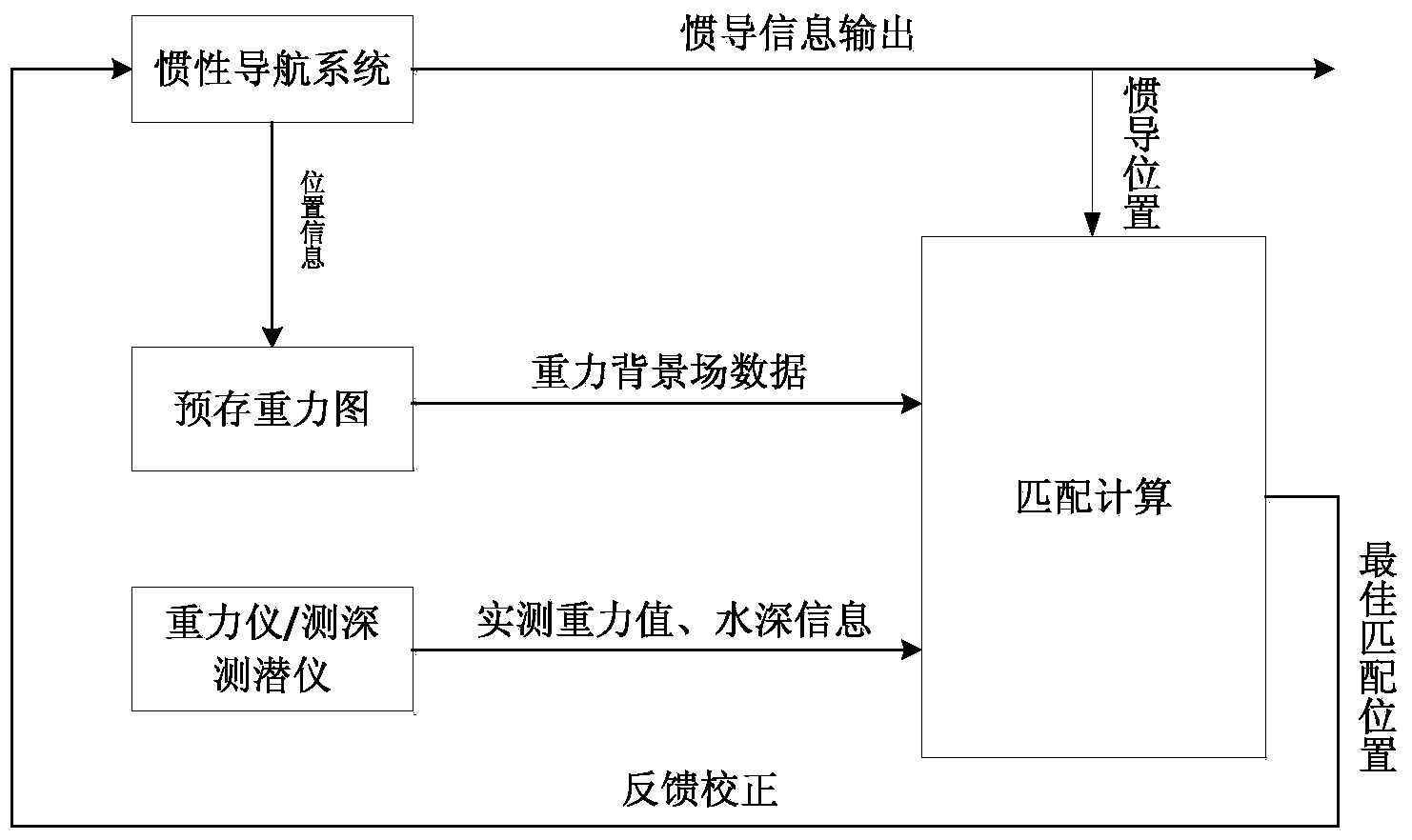
[0024] Such as figure 1 As shown, the traditional gravity-assisted inertial navigation system is generally divided into four modules: the inertial navigation system, the pre-stored gravity reference map, the measured gravity parameter system based on the moving base, and the matching algorithm. The main purpose of the inertial navigation system module is to carry out autonomous and concealed navigation and positioning of the aircraft during navigation; the main purpose of the pre-stored gravity map module is to use the position indicated by the inertial navigation system to find the gravity value on the gravity map as a matching value; The main purpose of the measured gravity system mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More