Tap massaging robot
A robot and mechanical arm technology, applied in the field of percussion massage robots, can solve the problems of human injury, high massage intensity, and impact, and achieve the effects of avoiding secondary injuries, simple structure, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the embodiments and accompanying drawings. The specific embodiments are only further detailed illustrations and explanations of the present invention, and do not limit the protection scope of the claims of the present invention.
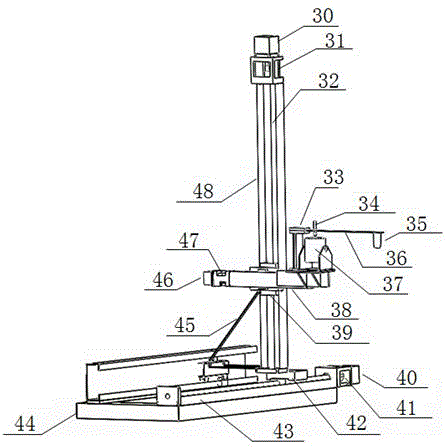
[0018] The percussion massage robot designed by the present invention (abbreviation robot, see Figure 1-4 ), including a control system, a stepper motor, a stepper motor driver, an encoder, a three-degree-of-freedom rectangular coordinate manipulator, an infrared ranging sensor, an acceleration sensor, a tapping massage module, a control handle and a photoelectric limit switch; the three The degree of freedom Cartesian coordinate mechanical arm is provided with three movable axes, which are X axis 43, Y axis 38 and Z axis 48 respectively. The X axis is located on the base 44, and the Y axis 38 is co-ordinated with the Z axis linear module slide 39, the Z-axis 48 is con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com