

Method for realizing synchronous PTP motion in robots and device thereof
A robot and motion time technology, applied in the field of robotics, can solve problems such as the inability to complete trajectory point generation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
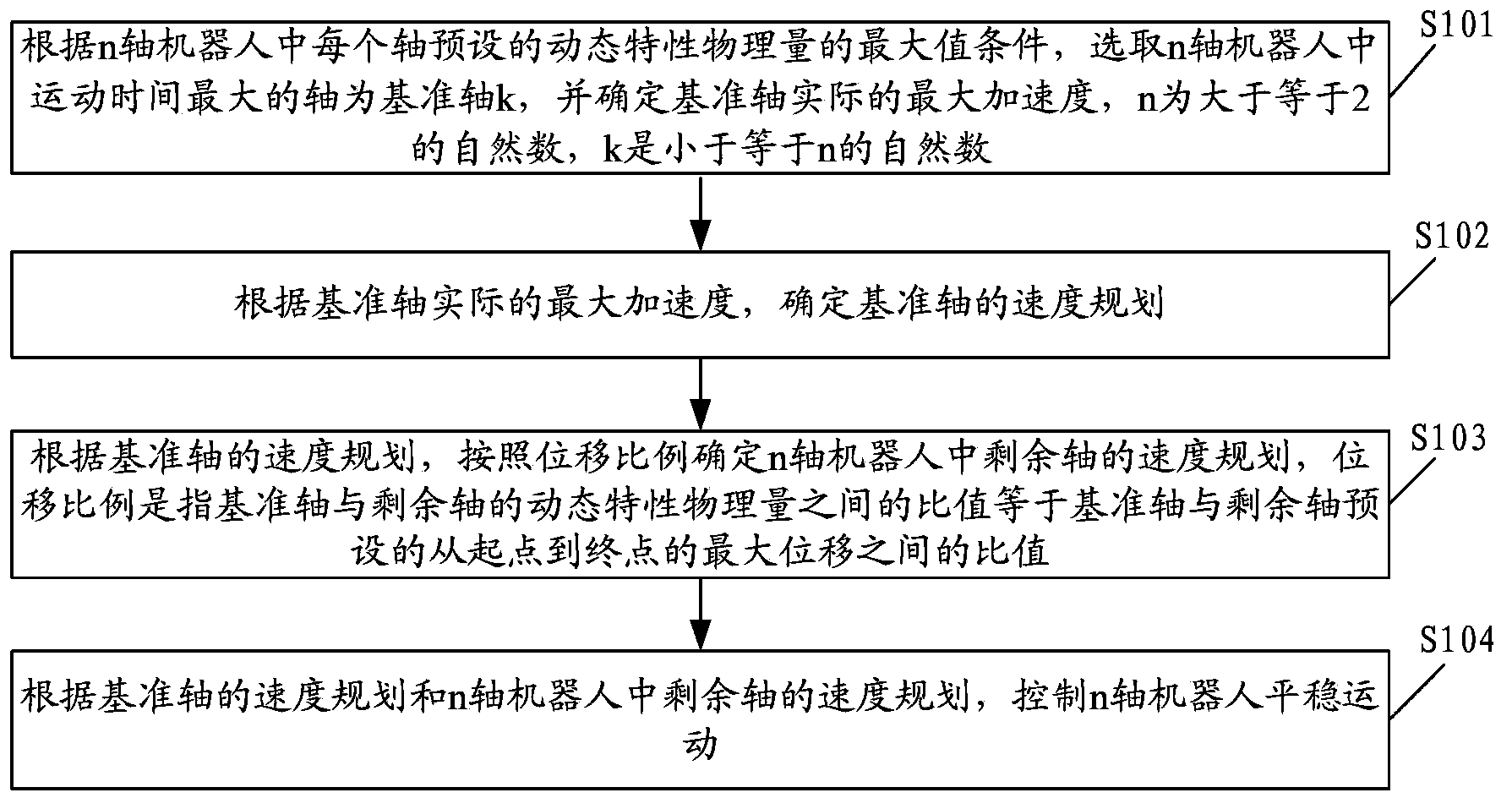
[0038] refer to figure 1 , figure 1 It is a flowchart of an embodiment of a method for realizing synchronous point-to-point PTP motion in the robot of the present invention, including:
[0039] Step S101: According to the maximum condition of the preset dynamic characteristic physical quantity of each axis in the n-axis robot, select the axis with the largest movement time in the n-axis robot as the reference axis k, and determine the actual maximum acceleration of the reference axis, n is greater than or equal to is a natural number of 2, and k is a natural number less than or equal to n.
[0040] A robot is a machine device that performs work automatically, and is a machine that realizes various functions by its own power and control capabilities. According to ISO 8373, a robot is defined as an industrial automation device whose position can be f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More