

Six-degree-of-freedom moving mechanism for extracorporeal shock wave device
An extracorporeal shock wave and motion mechanism technology, applied in the field of medical devices, can solve the problems of cumbersome positioning mechanism operation and inability to achieve blind spot positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to have a further understanding and understanding of the structural features and the achieved effects of the present invention, the following preferred embodiments and accompanying drawings are used for a detailed description, as follows:
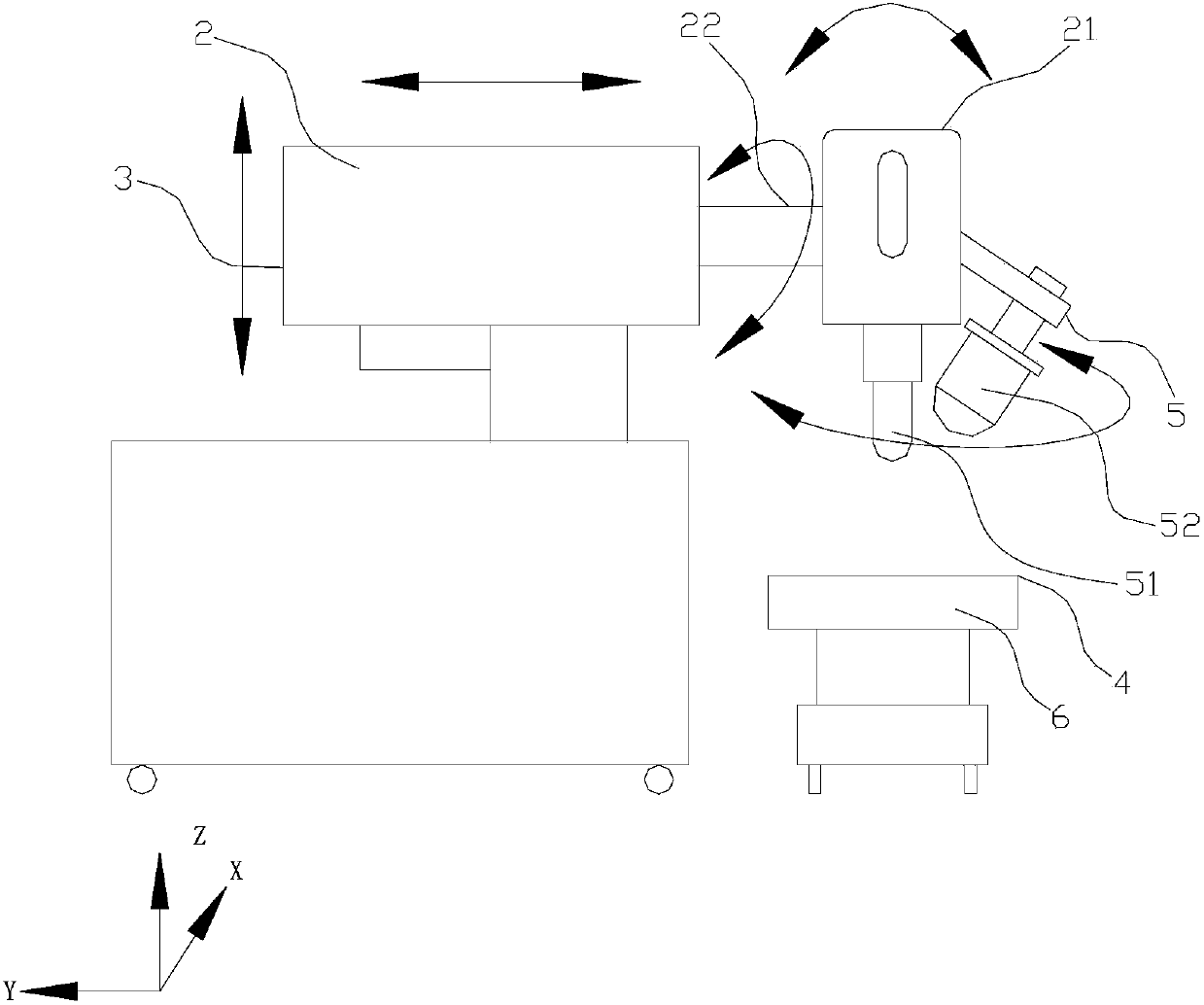
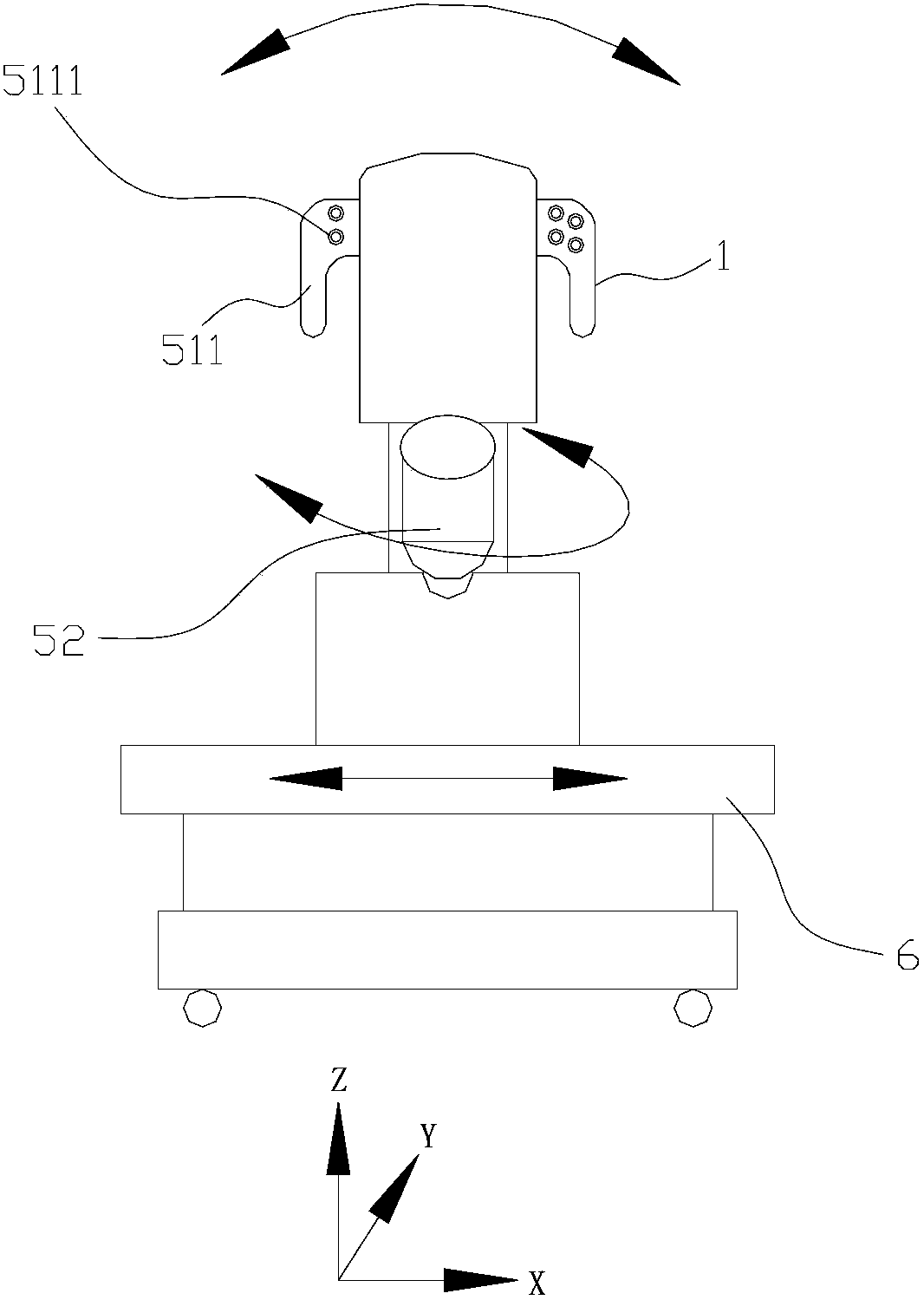
[0022] see figure 1 and figure 2 , a six-degree-of-freedom motion mechanism for extracorporeal shock wave equipment, including a manual displacement mechanism 1, a Y-axis main machine moving mechanism 2, a Z-axis main machine moving mechanism 3, an X-axis treatment bed moving mechanism 4, and a Y-axis main machine moving mechanism 2 is provided with a The X-axis rotating mechanism 21 that rotates around the axis and the Y-axis rotating mechanism 22 that rotates around the Y-axis. The Y-axis host moving mechanism 2 is also provided with a Z-axis rotating mechanism 5 that rotates around the Z axis, thereby realizing the positioning of six degrees of freedom.
[0023] The Z-axis rotating mechanism 5 is composed of a B-ultraso...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More