

Flying tongue capture mechanism and space target acquisition method
A capture mechanism and flying tongue technology, which is applied to aerospace equipment, tools, transportation and packaging, etc., can solve the problems of large impact on target shape, long capture distance, structural damage, etc., and achieve low requirements for flight control capabilities, The effect of long operation distance and simple operation method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with accompanying drawing:
[0033] 1. Design of flying tongue catch mechanism
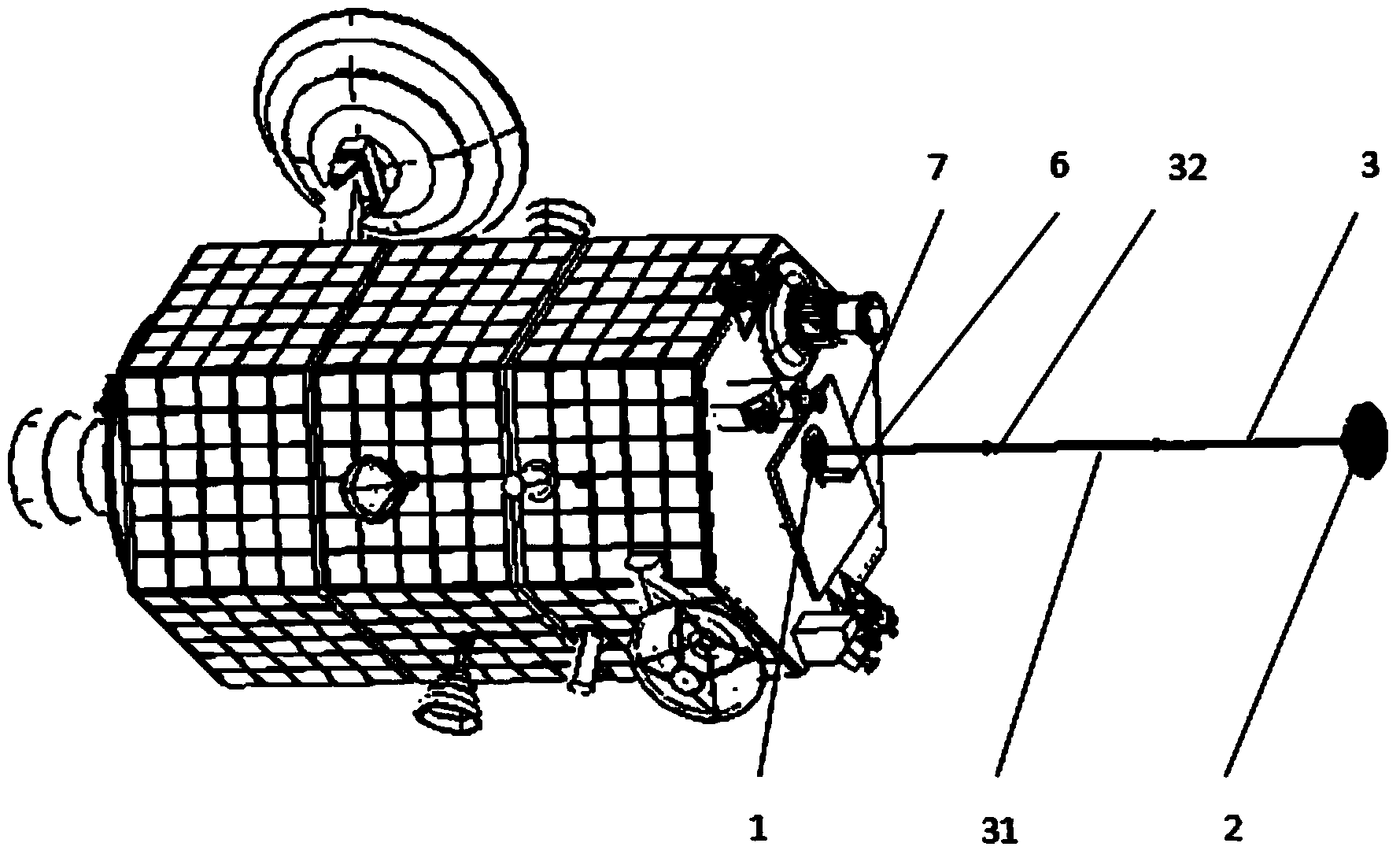
[0034] The flying tongue capture aircraft is composed of two parts: the aircraft platform (spacecraft platform) and the flying tongue capture mechanism (spacecraft load). Here, the aircraft platform can be selected according to the way the aircraft enters orbit and the ability to perform tasks. The conventional detection system used for target rendezvous is installed on the aircraft platform for long-range and short-range guidance and fly-around observation. The flying tongue catches mechanism and is installed on the aircraft platform by the aircraft platform mounting plate 7, as figure 1 shown. The following article focuses on the composition of tongue-catching agencies.
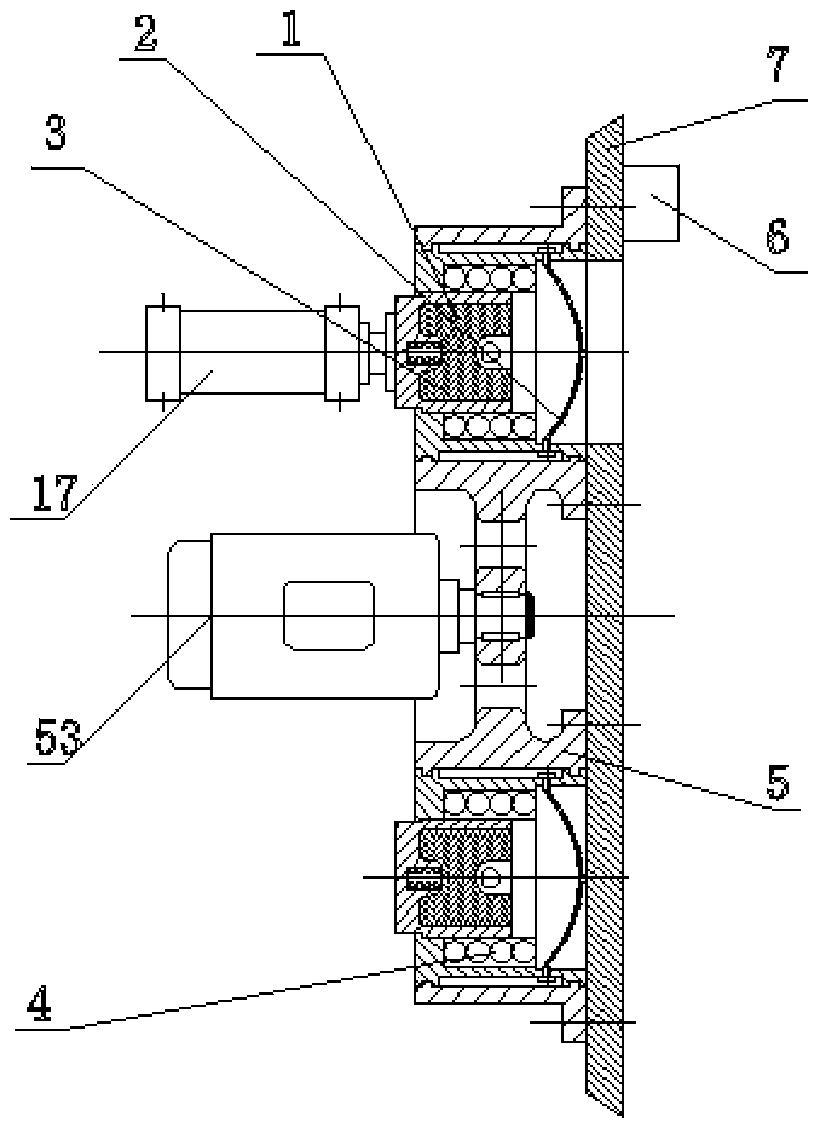
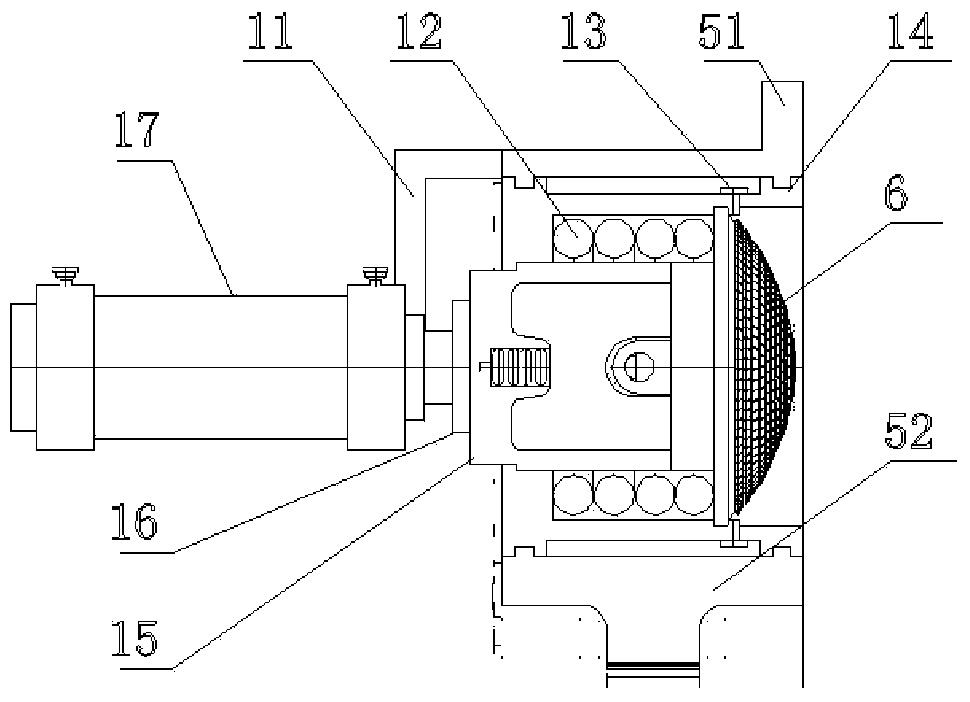
[0035] The flying tongue capture mechanism is mainly composed of an ejection system and an aiming system, such as figure 2 shown. The aiming and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More