

Robot rotational joint driving device and method
A technology for rotating joints and driving devices, which is applied to fluid pressure actuating devices, mechanical equipment, servo motors, etc., can solve the problems of small inertia, high cost, complex structure of DC motors, etc., and achieves high output power, high reliability, and high reliability. Guaranteed accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] At present, the joint drive of the rotary robot is mainly realized by the mechanical transmission actuator with the DC servo motor as the driving source, but the structure of the DC motor is complex and the cost is high. Some special-purpose rotating robots require high output power and compact structure of the drive device, that is, actuators with high power density to deal with the mass distribution of the robot. The current robot joint drive technology cannot solve this problem well.
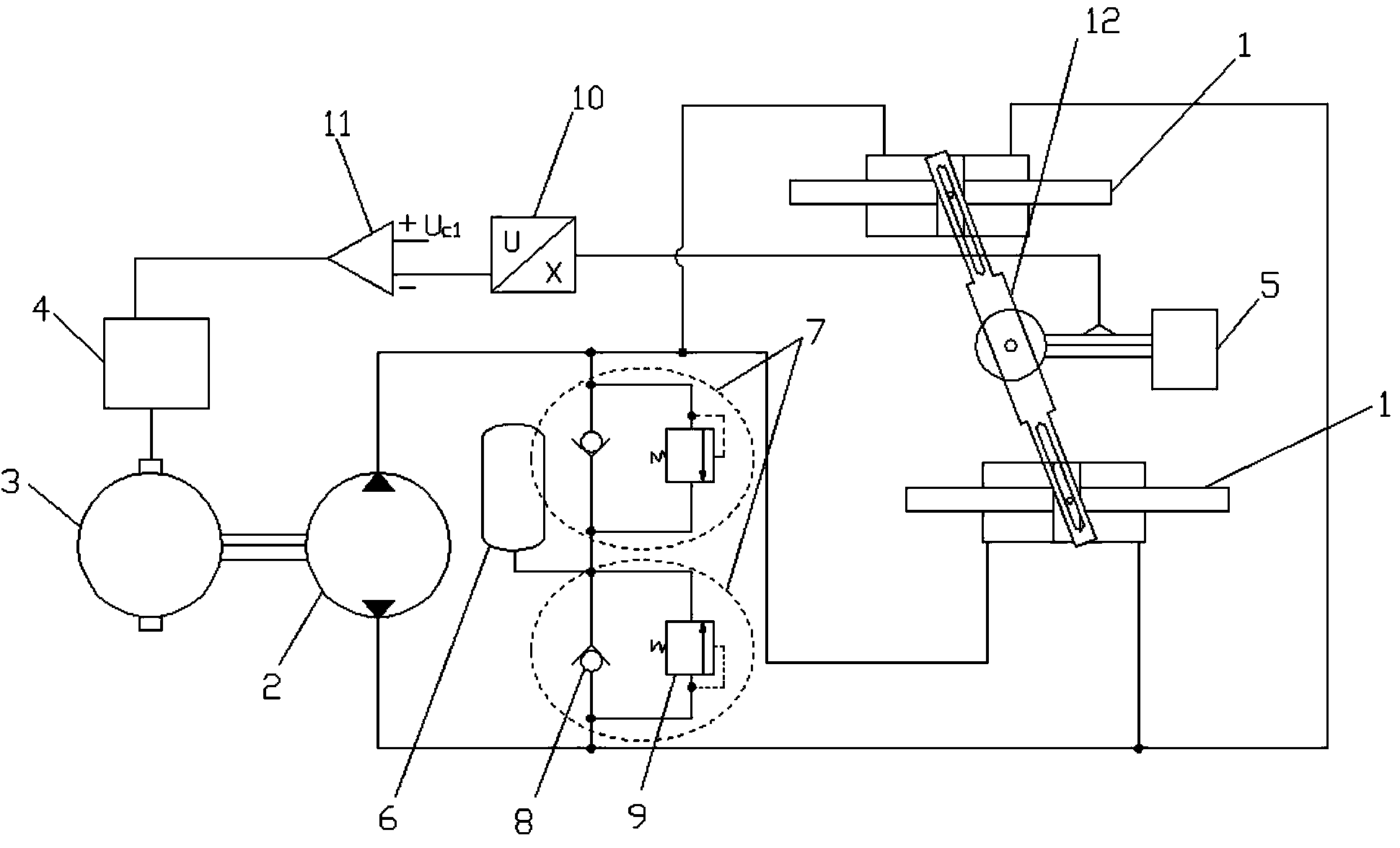
[0036] Aiming at the deficiencies in the prior art, the present invention provides a robot rotary joint driving device and a driving method. The driving device uses a servo motor to drive a hydraulic actuator for output, and the output power is large, which can effectively solve the problem of high power, high power, and The compact structure of the rotary joint is required, and the driving device has a simple structure, is easy to implement, and has high reliability.
[0037] The tech...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More