

Driving-and-driven combined boosting type flexible lower limb exoskeleton
An active-passive, exoskeleton technology, applied in medical science, artificial legs, prostheses, etc., can solve problems such as high energy consumption and complex driving, and achieve the effects of reducing energy consumption, reducing the difficulty of computing, and reducing redundancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0024] Such as Figure 1-6 shown.
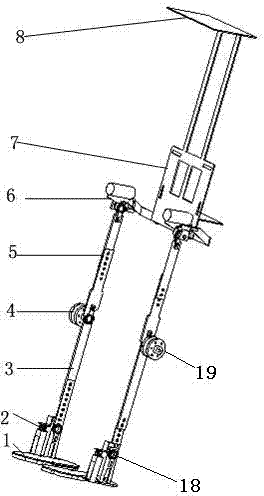
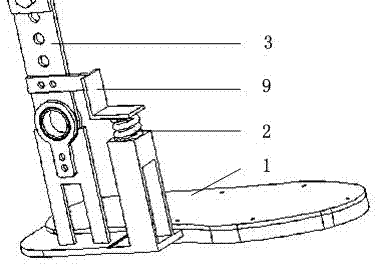
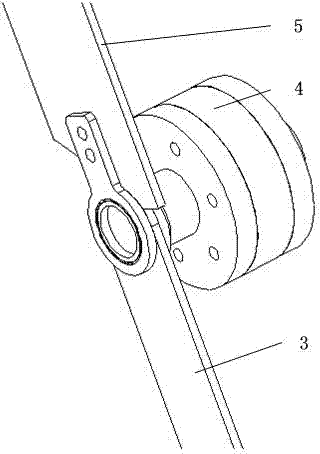
[0025] A flexible lower limb exoskeleton combining active and passive combined strength, which includes foot 1, calf 3, thigh 5 and back frame 7, the length of calf 3 and thigh 5 is adjustable, and the connection between foot 1, calf 3 and thigh 5 and the human body in the same way as existing exoskeletons, such as figure 1 As shown, a solar device 8 for charging the battery on the back is installed on the back frame 1, and the calf 3 is rotatably connected with the foot 1 through the ankle joint 18. The lower end of the calf 3 is connected with an ankle joint pressing plate 9, and the ankle joint pressing plate 9 It counteracts with the ankle joint spring 2 for foot assist, the ankle joint spring 2 is installed in the spring seat 201, and the spring seat 201 is fixedly connected with the foot 1 (plantar plate),...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More