

Completely-decoupled type forging manipulator lifting mechanism
A forging manipulator, complete decoupling technology, applied in the direction of forging/pressing/hammering machinery, manufacturing tools, forging/pressing/hammer devices, etc., to achieve the effect of complete decoupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
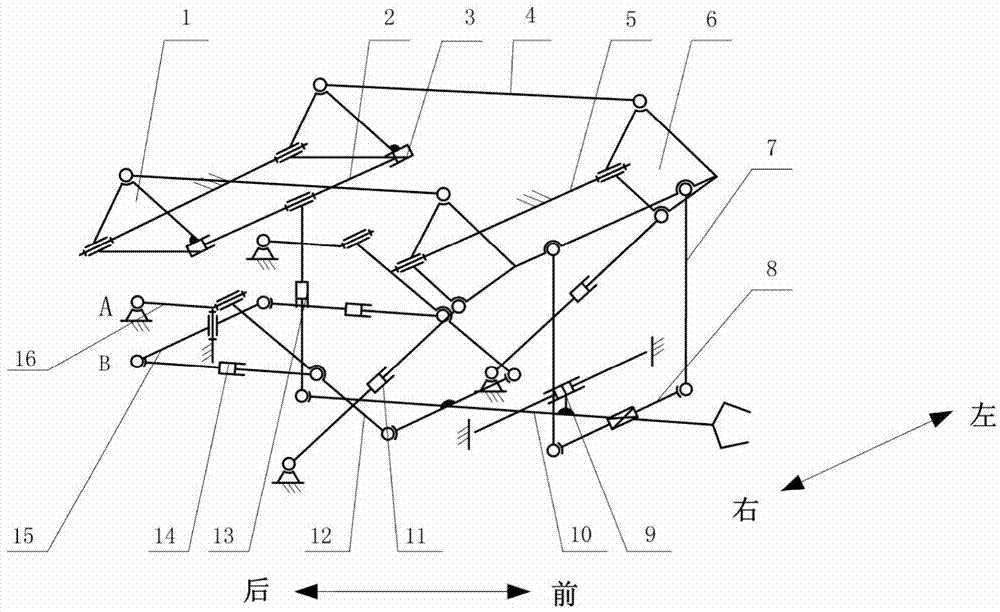
[0011] exist figure 1 In the schematic diagram of the hoisting mechanism of a completely decoupled forging manipulator shown, the front end of the tong rod 10 is connected to the front sliding rod 8 through a moving pair, and the two ends of the front sliding rod are respectively connected to the lower ends of a pair of front suspension rods 7 through ball joints. , the upper end of the front suspension rod is connected to the beam of a pair of front lifting arms 6 through a ball joint, the upper part of the front lifting arm is connected to the front end of the synchronization rod 4 through a ball joint, and the rear end of the synchronization rod is connected to the upper part of the rear lifting arm 1 through a ball joint , the above-mentioned front and rear lifting arms are respectively connected with the frame 5 by rotating hinges arranged in the left and right horizontal directions of the axis; The arranged rotary hinge is connected to the rear slide bar 2; the moving en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More