

Fast-moving star tracking matching identification method of star sensor
A technology of star sensor and recognition method, which is applied in the field of satellite autonomous navigation, can solve the problems of small number of stars, false matching, and poor stability of tracking methods, etc., and achieve the effect of improving stability and eliminating false matching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
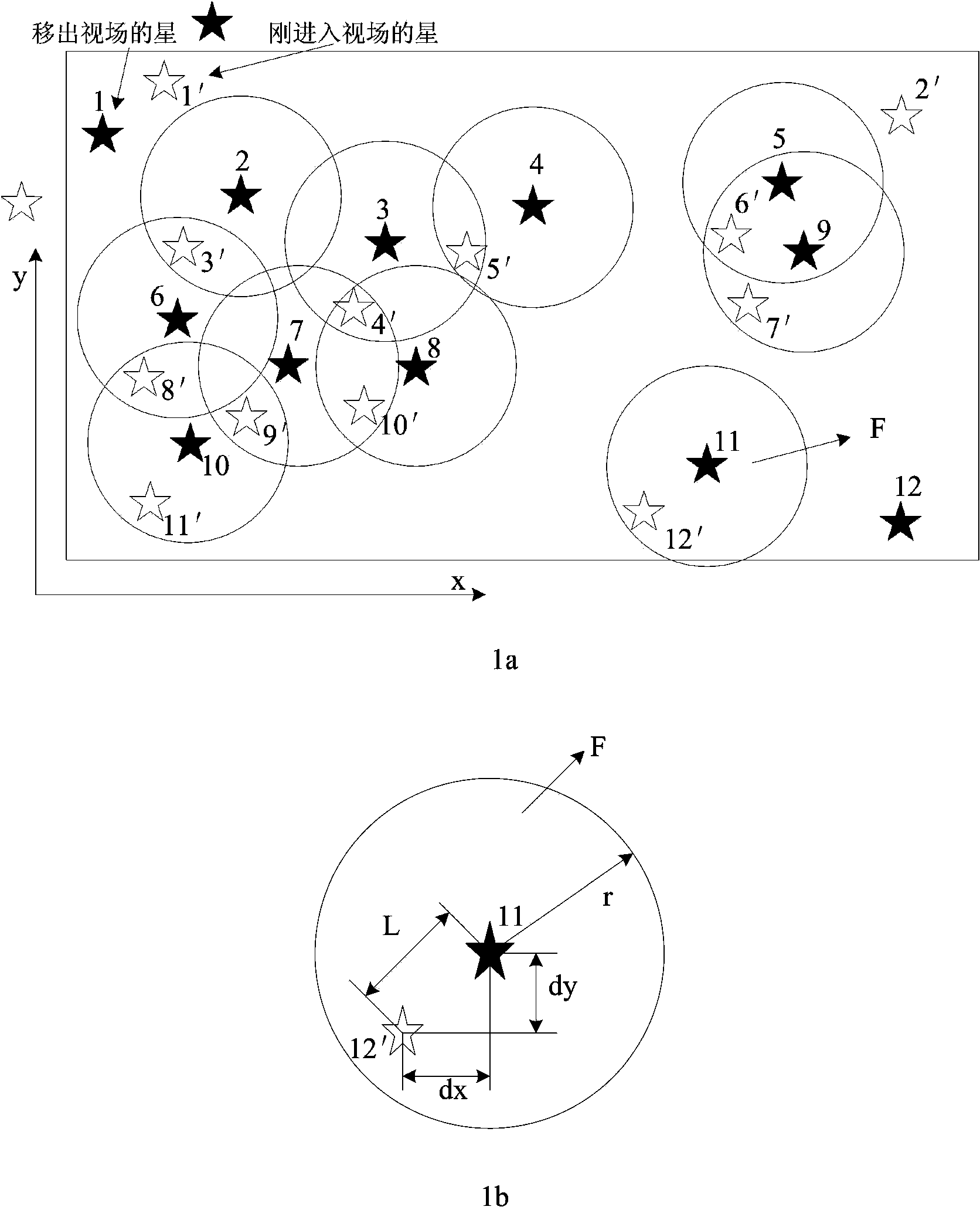
[0027] Specific implementation mode 1. Combination Figure 1 to Figure 9 Description of this embodiment, a fast star tracking and matching recognition method for a star sensor. First, by determining the edge area of the field of view, an effective reference star is selected to participate in the matching recognition, which can avoid mis-matching caused by new stars entering the field of view, thereby improving The effectiveness of the star tracking algorithm; then use the two-way recursive idea to carry out matching recognition, which greatly increases the number of stars tracked and matched in each step; the specific steps are:
[0028] 1. Determination of the edge area of the field of view:
[0029] During the actual working process of the star sensor, due to the movement of the platform attitude, the stars appearing in the edge area of the field of view of the star sensor will be unstable, that is, these stars may just enter the field of view, or may be in the next fr...
specific Embodiment approach 2
[0049] Specific embodiment two, combine Figure 10 and Figure 11 Describe this implementation mode, this implementation mode is the embodiment of the fast star tracking matching identification method of the star sensor described in the specific implementation mode one:
[0050] In this embodiment, the star sensor integration time is set to 0.1s, the neighborhood radius r is 50, and the image plane size is 2048×2048 pixels. According to equations (1) and (2), the edge area of the field of view is determined to be 26 from the field of view. area within pixels. Perform fast star tracking when the angular velocity of the attitude movement is 0.2° / s and 10° / s respectively, the performance comparison of the two fast star tracking algorithms is as follows Figure 10 , 11 shown.
[0051] In the case of a large neighborhood radius, by Figure 10 , 11 It can be seen that when the angular velocity of the attitude movement is small, using the fast star tracking method described i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More