

An inertial navigation astronomical high-precision compound two-position alignment and error calibration method
An error calibration and high-precision technology, applied in the field of inertial navigation, can solve problems such as the inability to achieve real-time autonomous positioning, and achieve the effect of meeting precise landing tasks, correcting accumulated errors, and improving navigation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0110] The present invention will be further described in detail below in conjunction with the accompanying drawings.
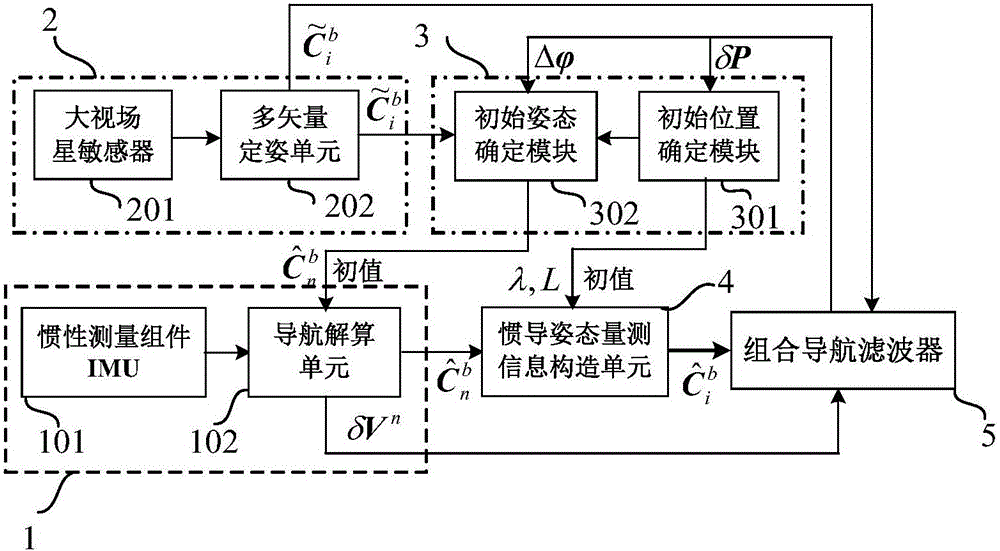
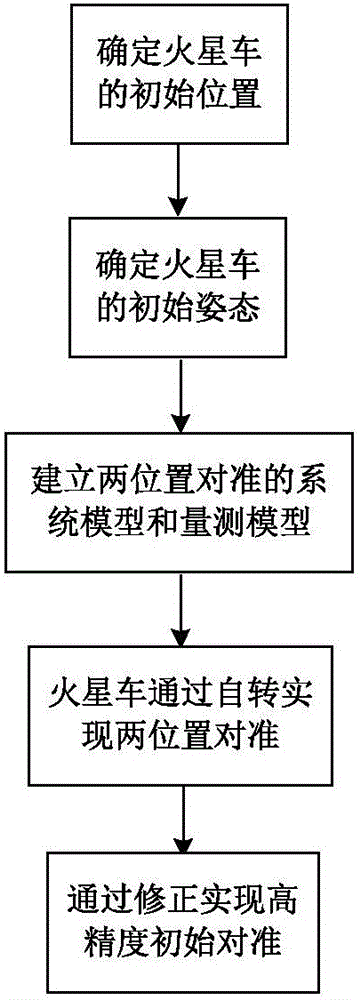
[0111] The invention proposes an inertial navigation astronomical high-precision composite two-position alignment and error calibration method. By taking the landing position determined by the lander as the initial position information (λ, L) of the rover, and then according to the navigation time t and the output of the celestial navigation subsystem 2 Determine the initial attitude matrix of the rover On this basis, using the high-precision inertial attitude matrix provided by the celestial navigation subsystem 2 And the speed error information (δV n ), and combined with the error model of the strapdown inertial navigation system, the integrated navigation filter 5 is used to estimate and correct the system error, so as to realize the high-precision initial alignment and error calibration of the star.
[0112] See figure 1 , the present invention pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More