

Waist device with hip joint parameter measurement applicable to exoskeleton auxiliary support robot
An auxiliary support and parameter measurement technology, applied in the field of service robots, can solve the problems of soldiers being exhausted and difficult to persist in independent combat for a long time, and achieve the effect of good combination, novel structure and reliable use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described in detail below in conjunction with the accompanying drawings.
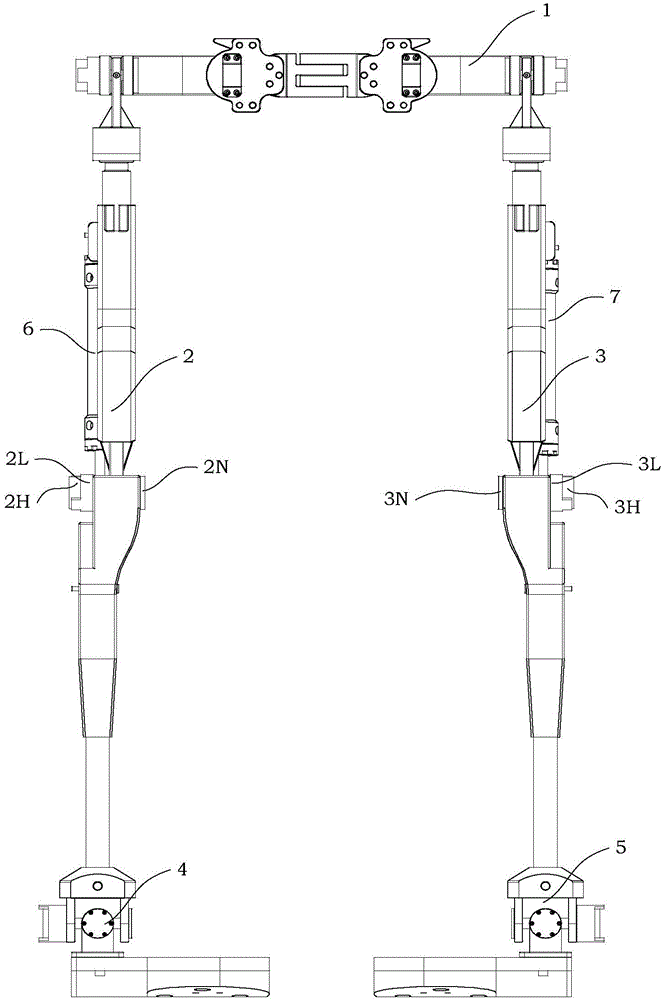
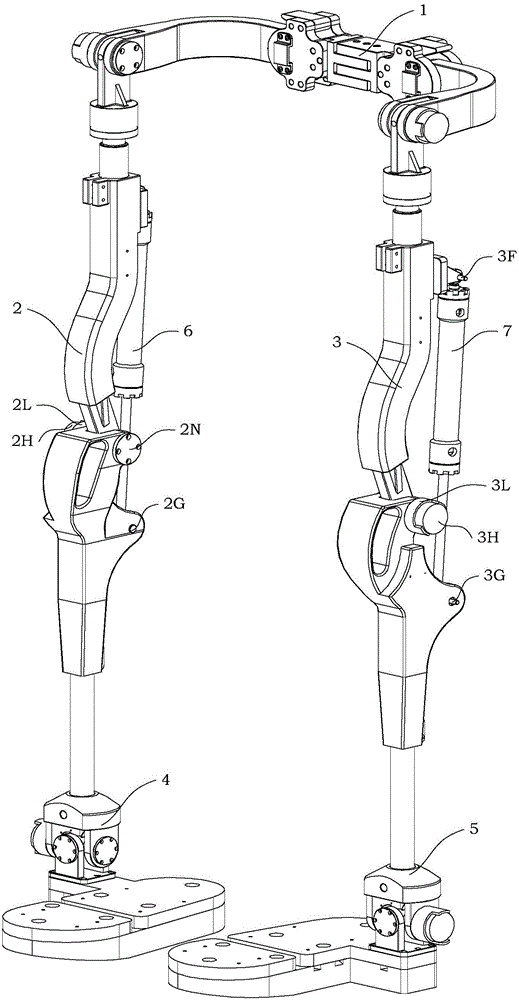
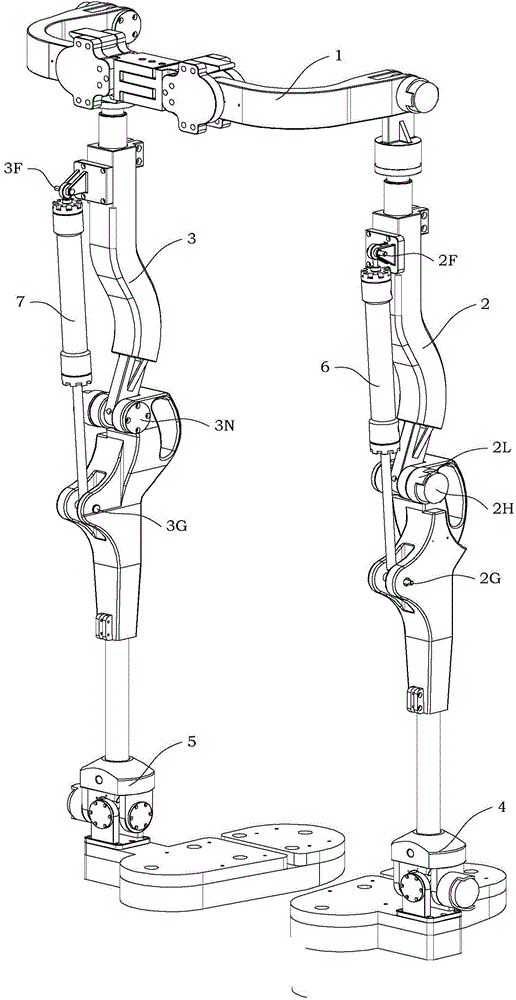
[0045] The present invention is an exoskeleton auxiliary support robot with joint parameter measurement, and the exoskeleton auxiliary support robot includes a waist device 1, a large and small leg device and a foot device. The large and small leg devices include a left leg assembly 2 and a right leg assembly 3; a left hydraulic cylinder 6 is installed on the left leg assembly 2, and a right hydraulic cylinder 7 is installed on the right leg assembly 3. The foot device includes a left foot assembly 4 and a right foot assembly 5 . The exoskeleton auxiliary supporting robot of the present invention is designed for simulating the characteristics of the waist, legs and feet of the human body.
[0046] In the present invention, the waist device 1 is designed with left and right hip joints. The left knee joint is designed in the left leg assembly 2, and the right...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More