

Data fusion method and device for multi-source heterogeneous sensors
A data fusion and sensor technology, applied in the field of data fusion, can solve problems such as inaccurate positioning and high computational complexity, and achieve the effects of optimizing tracking effects, efficient fusion, and improving algorithm accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
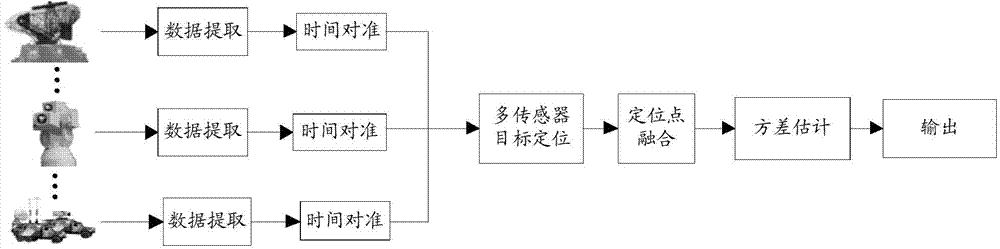
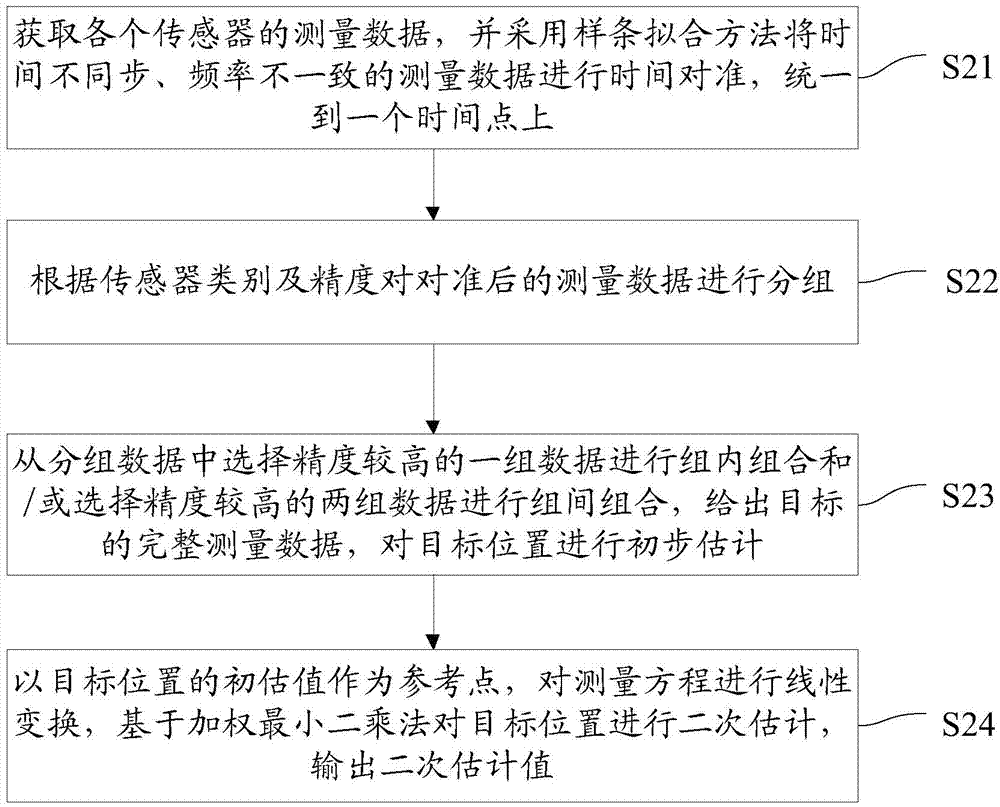
[0027] figure 2 The flow of the multi-source heterogeneous sensor data fusion method provided by the embodiment of the present invention is shown, and only the parts related to the embodiment of the present invention are shown for convenience of description.
[0028] Step S21 , acquiring the measurement data of each sensor, and using the spline fitting method to time-align the measurement data with asynchronous time and inconsistent frequency, and unify them to a time point.
[0029] The measurement output of the sensor is a data sequence. Since the acquisition frequency and acquisition time interval of different sensors are different, the measurement data output by each sensor is not synchronized. This step realizes the time alignment of the measurement data of different sensors and unifies them into one on time. Specifically include:
[0030] S211. Construct a cubic spline interpolation function for each sensor, and obtain a smooth curve through spline interpolation fitti...
Embodiment approach
[0102] Further as a preferred implementation manner, the step S24 also includes:
[0103] S240. After using the initial value of the target position as a reference point, adjust the position of the reference point.
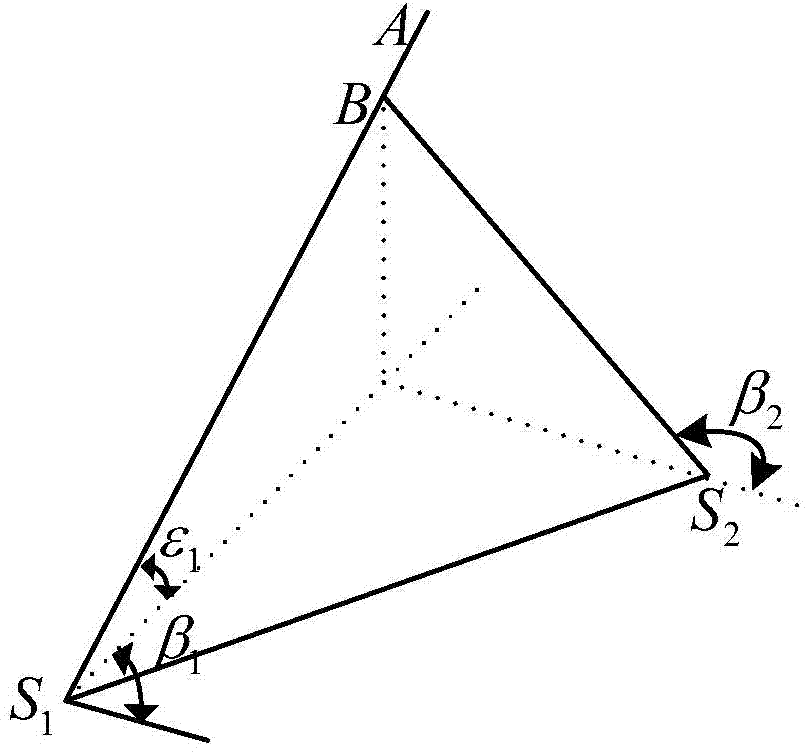
[0104] The target position estimate obtained by formula (11) is estimated in Cartesian coordinates. The measurement is carried out in the polar coordinate system. Estimates of target positions that appear accurate in Cartesian coordinates may be inaccurate when viewed in polar coordinates. In the case of inaccurate estimation of the target position, the position estimation of formula (11) cannot be directly used as the reference point, and the position of the reference point needs to be adjusted at this time. For a passive sensor, if it measures (β i ,ε i ) T Satisfies formula (19), it is considered that the estimated target position not allowed.
[0105] λ i = [ ...
Embodiment 2
[0115] Figure 8 The structure of the multi-source heterogeneous sensor data fusion device provided by the embodiment of the present invention is shown, and only the parts related to the embodiment of the present invention are shown for convenience of description.
[0116] The multi-source heterogeneous sensor data fusion device provided in this embodiment includes:
[0117] The time alignment module 81 is used to obtain the measurement data of each sensor, and use the spline fitting method to time-align the measurement data with time asynchronous and inconsistent frequencies, and unify them to a time point;
[0118] The first fusion module 82 is used to group the aligned measurement data according to the sensor category and accuracy;
[0119] The second fusion module 83 is used to select a group of data with higher precision from the grouped data for intra-group combination and / or select two groups of data with higher precision for inter-group combination to provide complete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More