Planning method for opposite angle trotting gait of large quadruped robot
A quadruped robot, gait technology, applied in two-dimensional position/lane control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be described in detail below in conjunction with specific embodiments and accompanying drawings. For the convenience of those skilled in the art to understand better, at first some terminology among the present invention is introduced as follows:
[0066] Gait: A walking pattern regarding the sequence of leg swings and their timing, etc.
[0067] Gait cycle T (Gait Period): The time required for a leg to move for a complete cycle in a cyclic gait.
[0068] Stride Length λ (Stride Length): In a gait cycle, the displacement of the center of gravity of the walking robot relative to the ground.
[0069] Support Phase: The state in which the leg is on the ground.
[0070] Transfer Phase: The state in which the leg is lifted off the ground and the leg is in the air.
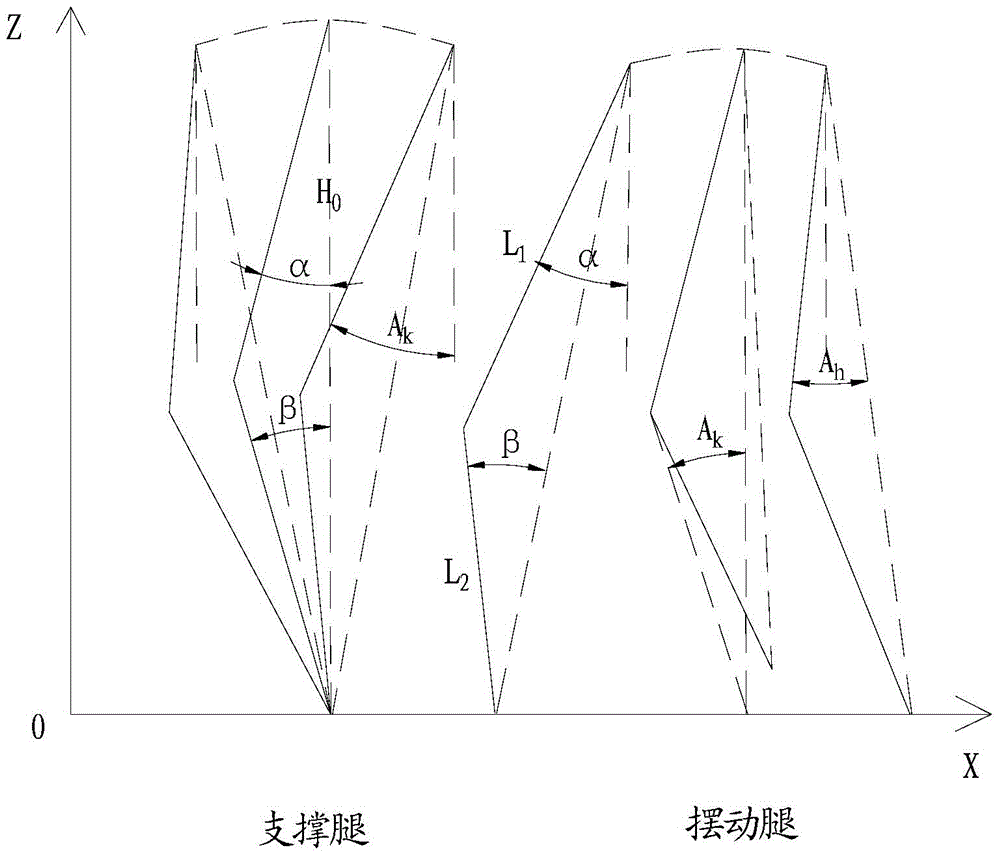
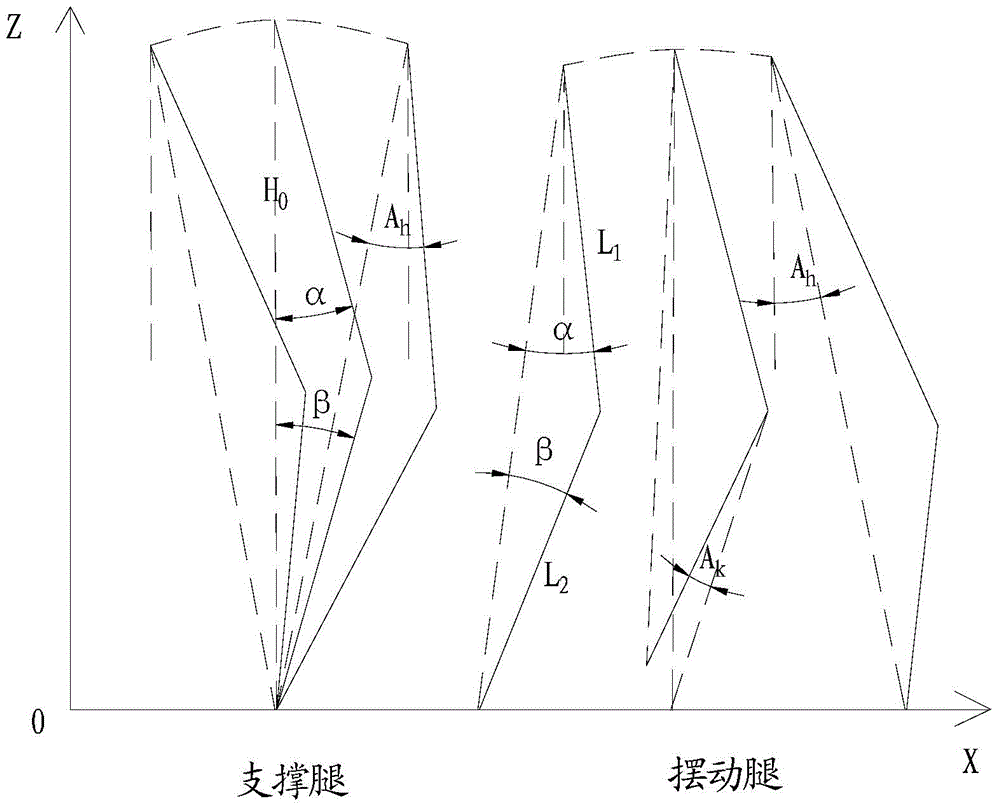
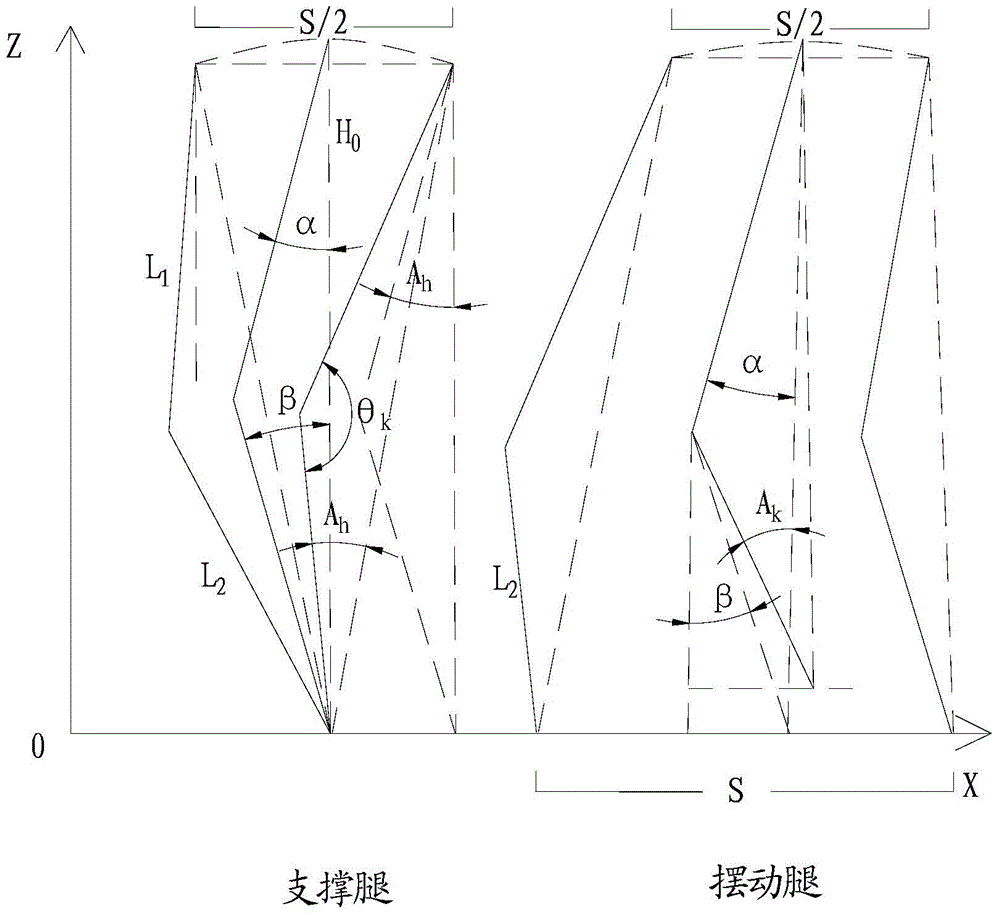
[0071] According to the method provided by the present invention, a complete diagonal trotting gait cycle includes five key postures in total, which are the initial phase posture of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More