

Control method of accurate landing of unmanned aerial vehicle
A control method and UAV technology, applied in three-dimensional position/channel control and other directions, to make up for the lack of accuracy and improve the landing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The control method for the precise landing of the drone provided by the present invention will be described in detail below in conjunction with the accompanying drawings.
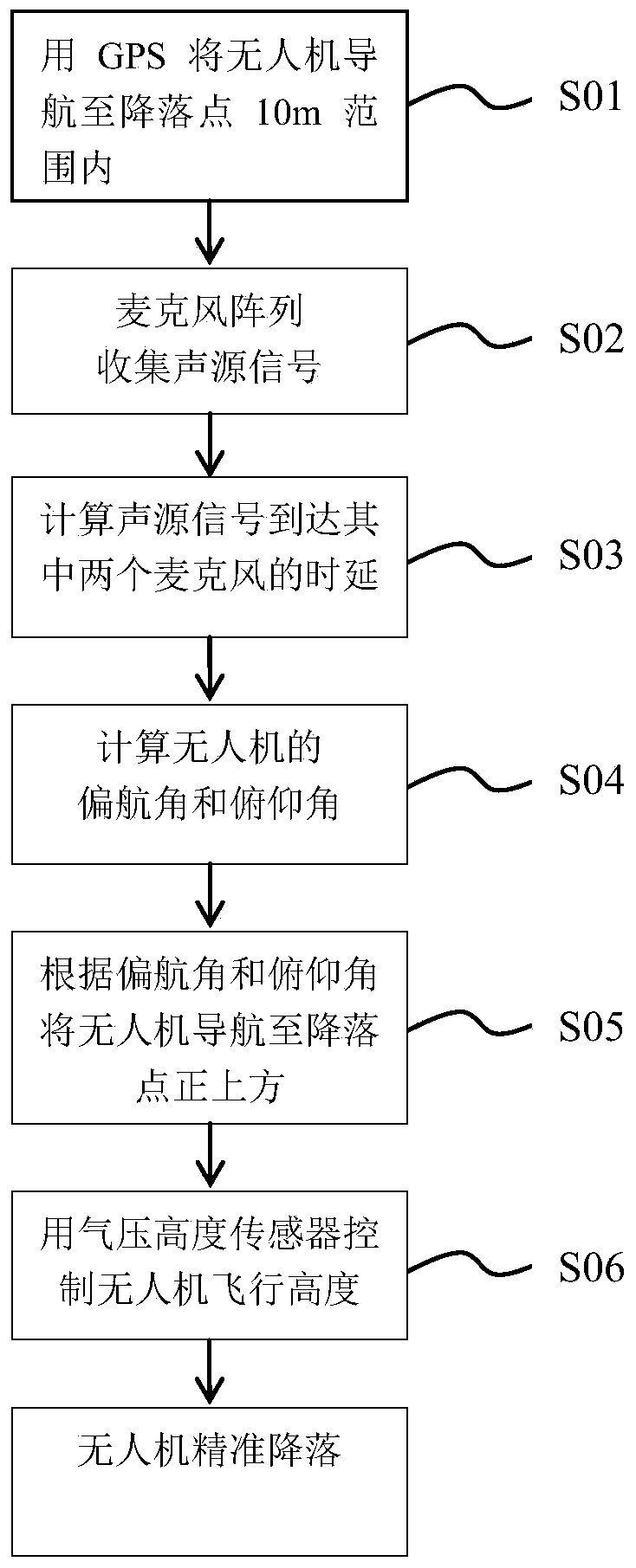
[0025] figure 1 It is a flow chart of the control method for precise landing of the drone in the embodiment.
[0026] Such as figure 1 As shown, the control method of the precise landing of the drone provided by the present invention comprises the following steps:
[0027] Step S01: Use GPS to navigate the UAV to the vicinity of the landing point. Due to the limitation of the accuracy of GPS navigation, the error of the UAV reaching the precise position of the landing point is -10m~10m.
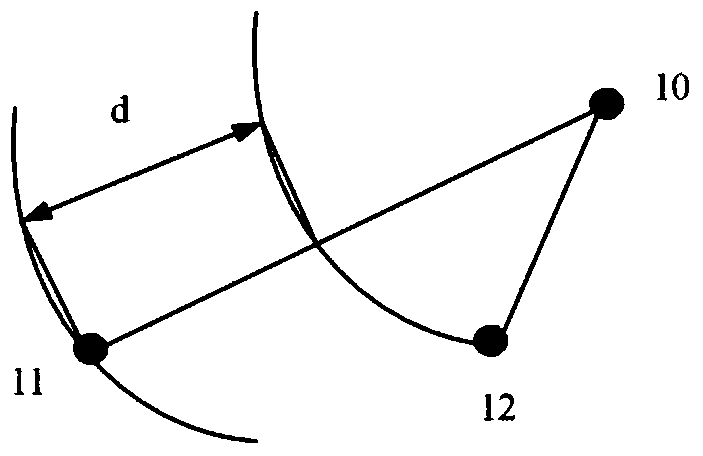
[0028] Step S02: Place a sound source at the landing point, and place a microphone array on the drone to collect the sound source signal. The microphone used in this embodiment is an omnidirectional electret microphone, consisting of four omnidirectional electret microphones. The microphones form a tetrahedral mi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More