

Inversion projection transformation based lane keeping method
A technology of lane keeping and back projection, which is applied to vehicle components, image data processing, external condition input parameters, etc., and can solve problems such as vehicle lane departure and traffic accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
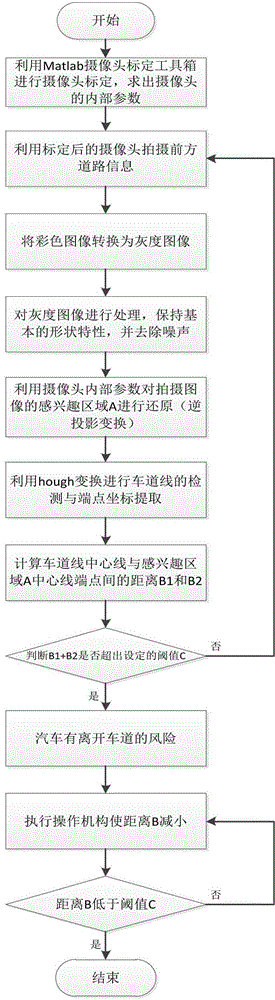
[0039] Such as figure 1 As shown, a lane keeping method based on inverse projection transformation includes the following steps:
[0040] 1) Use Camera Calibration Toolbox for Matlab software to calibrate the camera, and calculate the internal parameters of the camera. The internal parameters include the focal length fc (2x1 vector), the principal point coordinate cc (2x1 vector), the tilt coefficient alpha_c (scalar), and the distortion coefficient kc ( 5x1 vector).
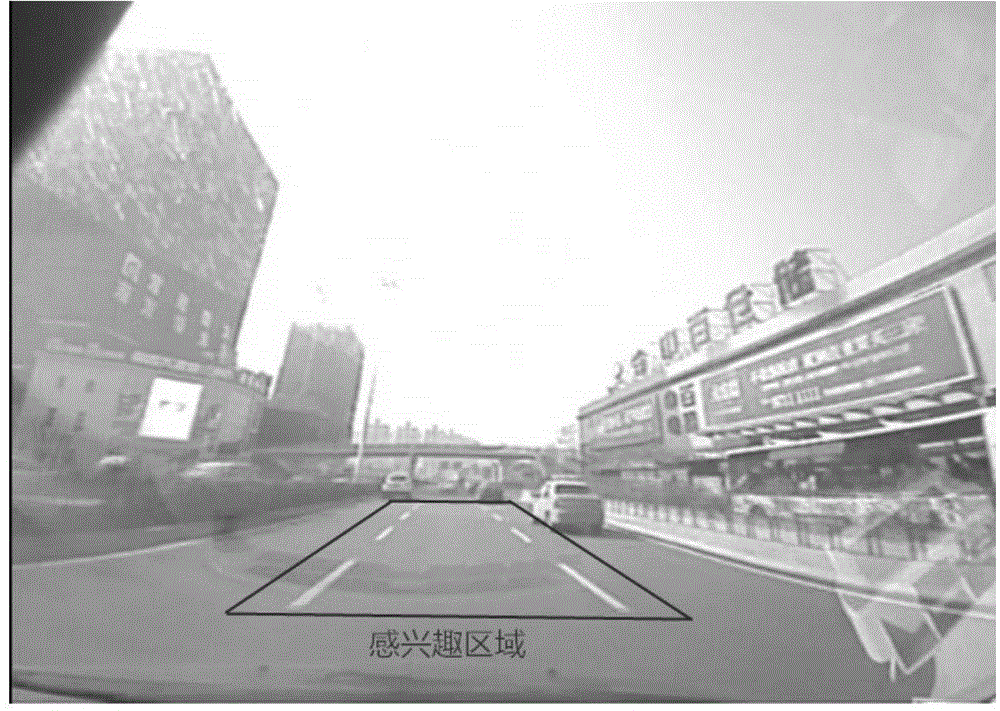
[0041] 2) Use the calibrated camera to capture the road information ahead, which is a perspective view, such as figure 2 Shown; convert color image to gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More