

Method for seeking for overall situation time optimal path under dynamic time varying environment
A time-optimized and environment-friendly technology, applied in the direction of road network navigators, measuring devices, instruments, etc., can solve the problems of search time and other problems, achieve superior solution results, and realize the effect of multi-scale navigation requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
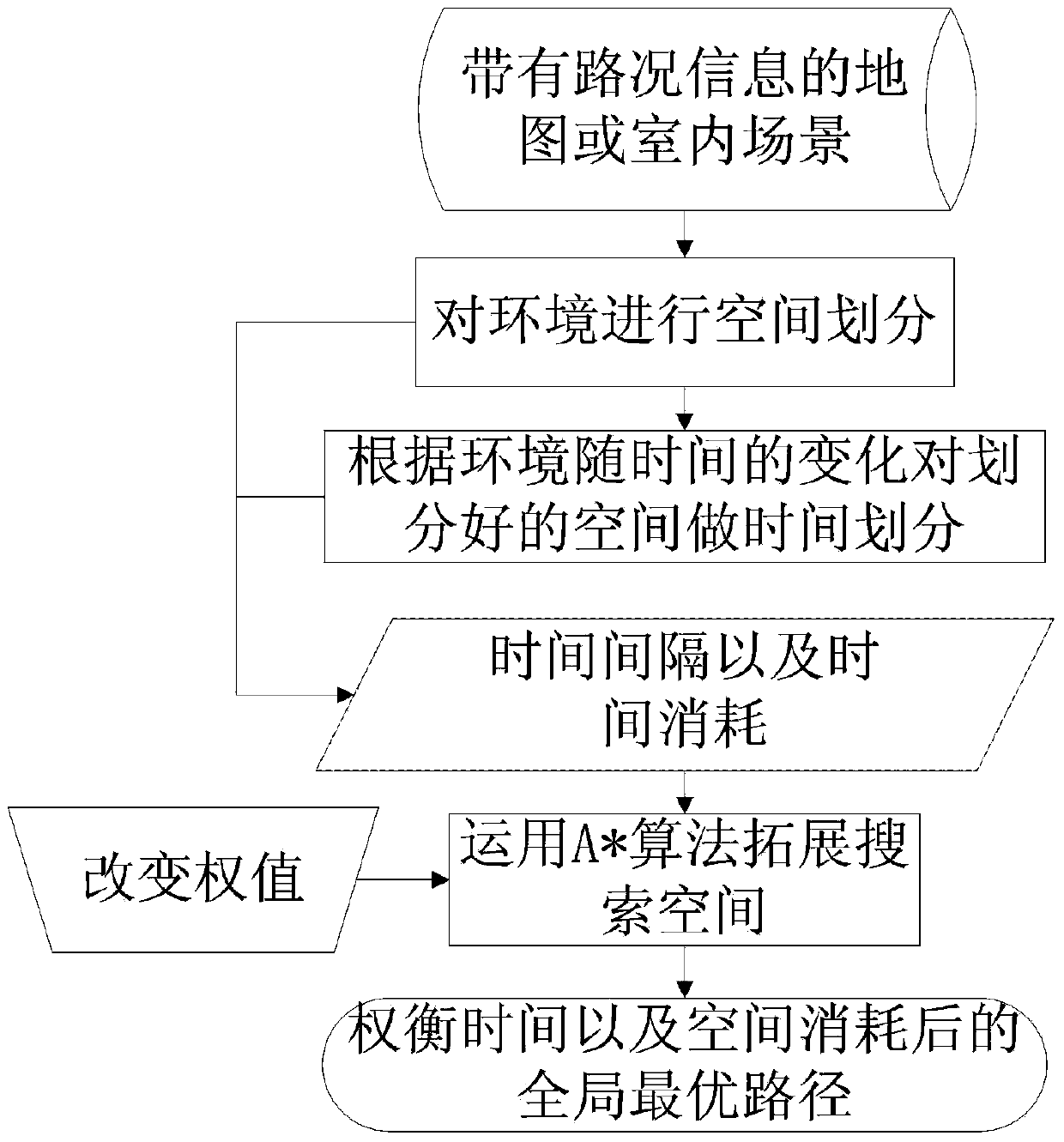
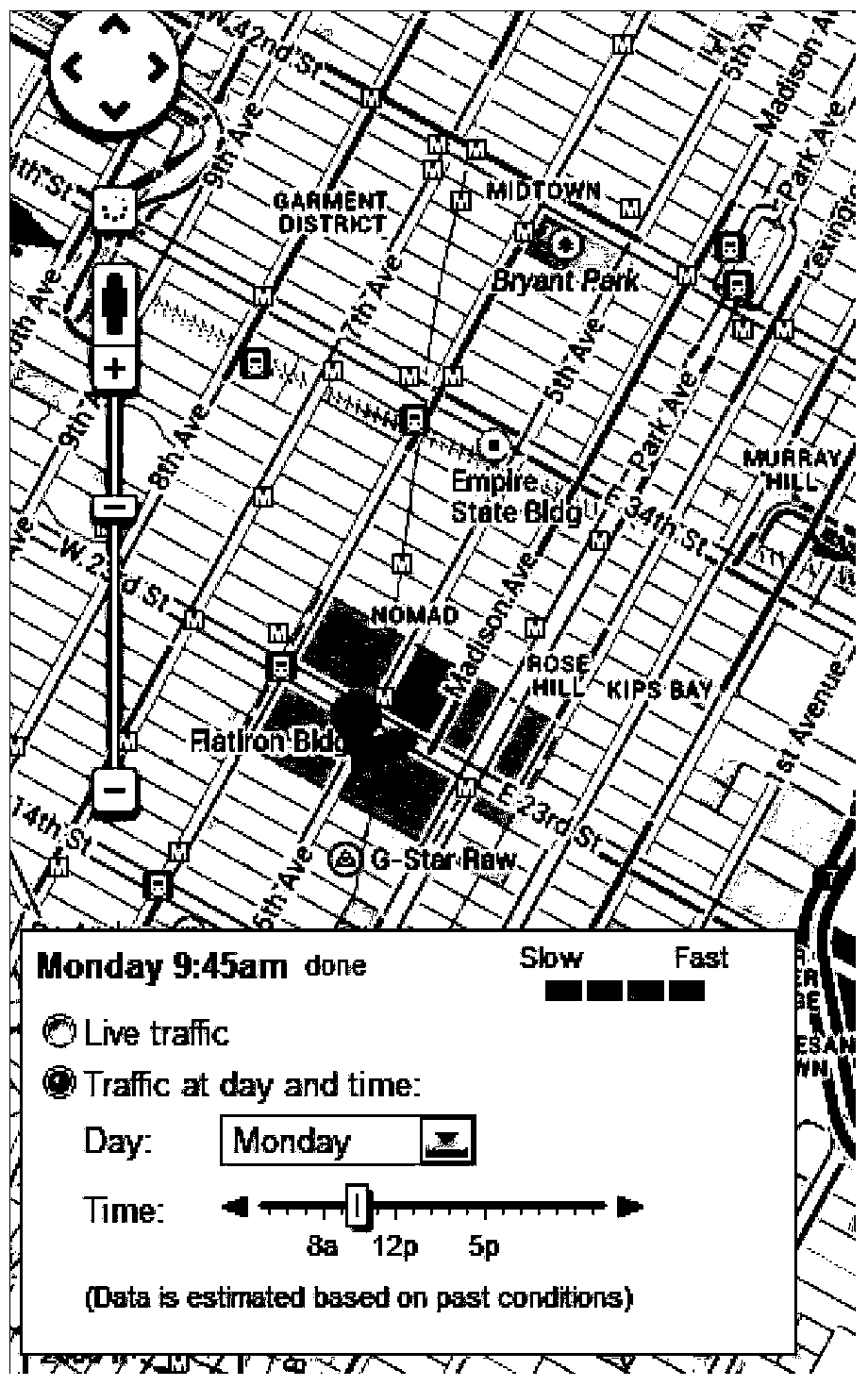
[0042] refer to figure 1 , figure 1 It is a flow chart of the steps of the method for seeking the global time optimal path under the dynamic time-varying environment of the present invention, including the following steps: firstly, the data acquisition step: obtaining historical and real-time road condition information through the traffic monitoring platform system. It should be noted here that, This invention needs to be realized on the premise of being able to predict the environmental information in the future time period, and the function of predicting road traffic information in the future time period is provided in the existing map systems, such as Google and Baidu maps, which are also suitable for indoor scenes. The trajec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More