

Camera-inertial sensor calibration method based on partial sensor information
An inertial sensor and calibration method technology, applied in the field of camera-inertial sensor calibration in computer vision, can solve the problems of increasing system error, large yaw angle error, and inability to effectively reduce system cumulative error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. It should be understood that the described embodiments are only some of the embodiments of the present invention, not all of them. example. Based on the embodiments of the present invention, all other implementations obtained by those skilled in the art without creative efforts fall within the protection scope of the present invention.
[0054] 1. System functions:
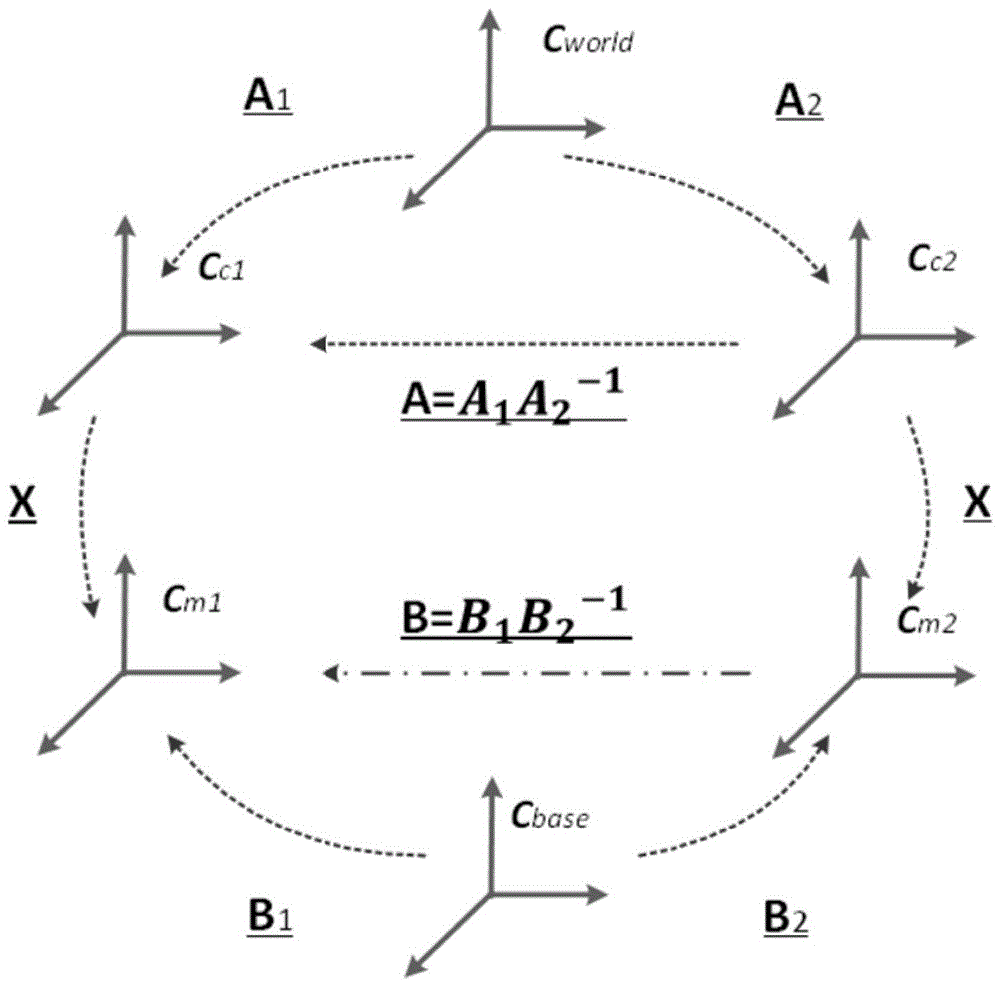
[0055] The traditional camera-inertial sensor calibration problem is theoretically reduced to solving a matrix equation:
[0056] R A R=RR B
[0057] This equation is called the calibration equation, as attached figure 1 shown. The camera and inertial sensor observe at two different poses, C C1 and C m1 are the coordinate system of the camera and the inertial sensor in the first pose state, C C2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More