

Calibration method and device of robot
A calibration method and calibration device technology, applied in the field of robotics, can solve the problems of high cost of measuring instruments, inability to see the puncture needle, and the unpredictable position of the puncture needle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048]The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
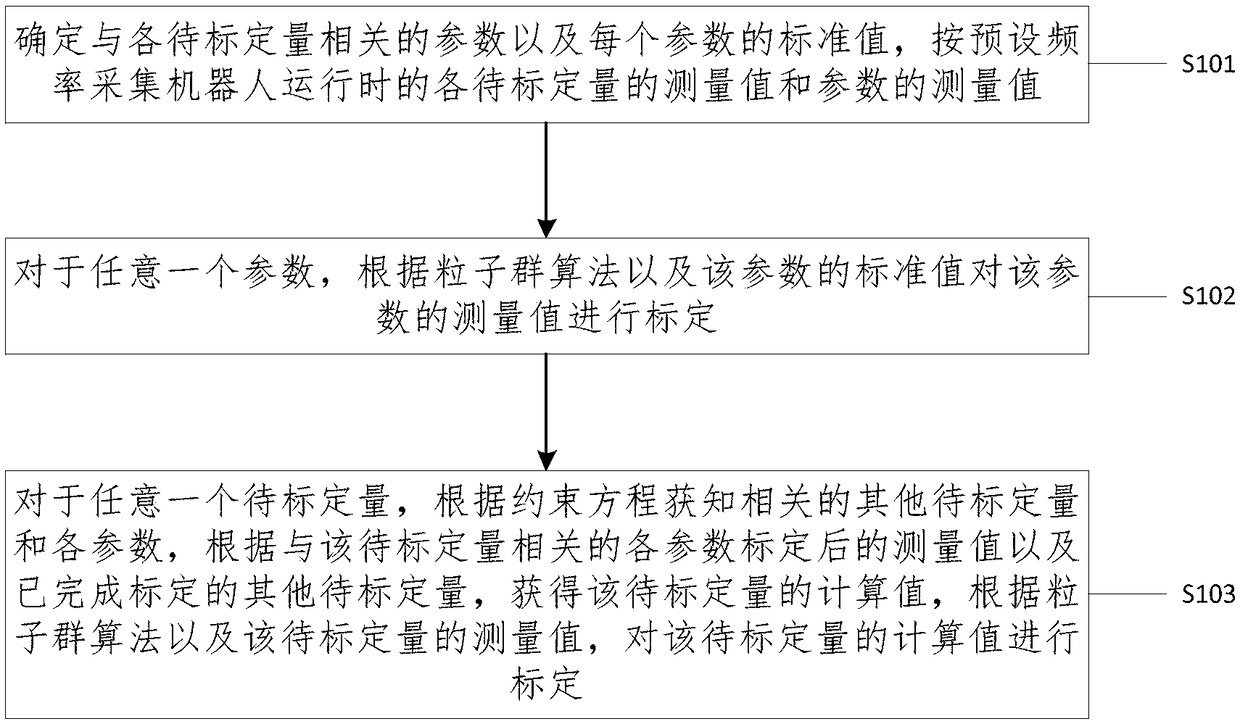
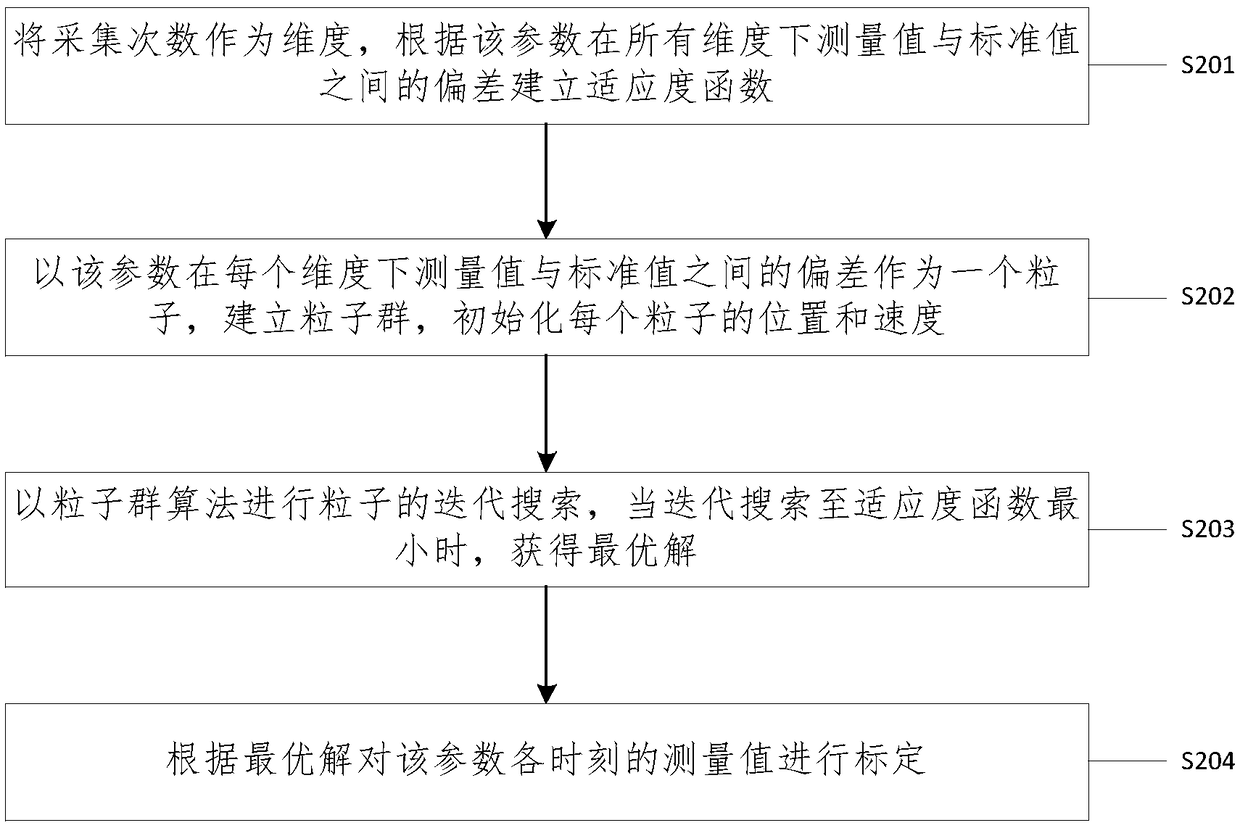
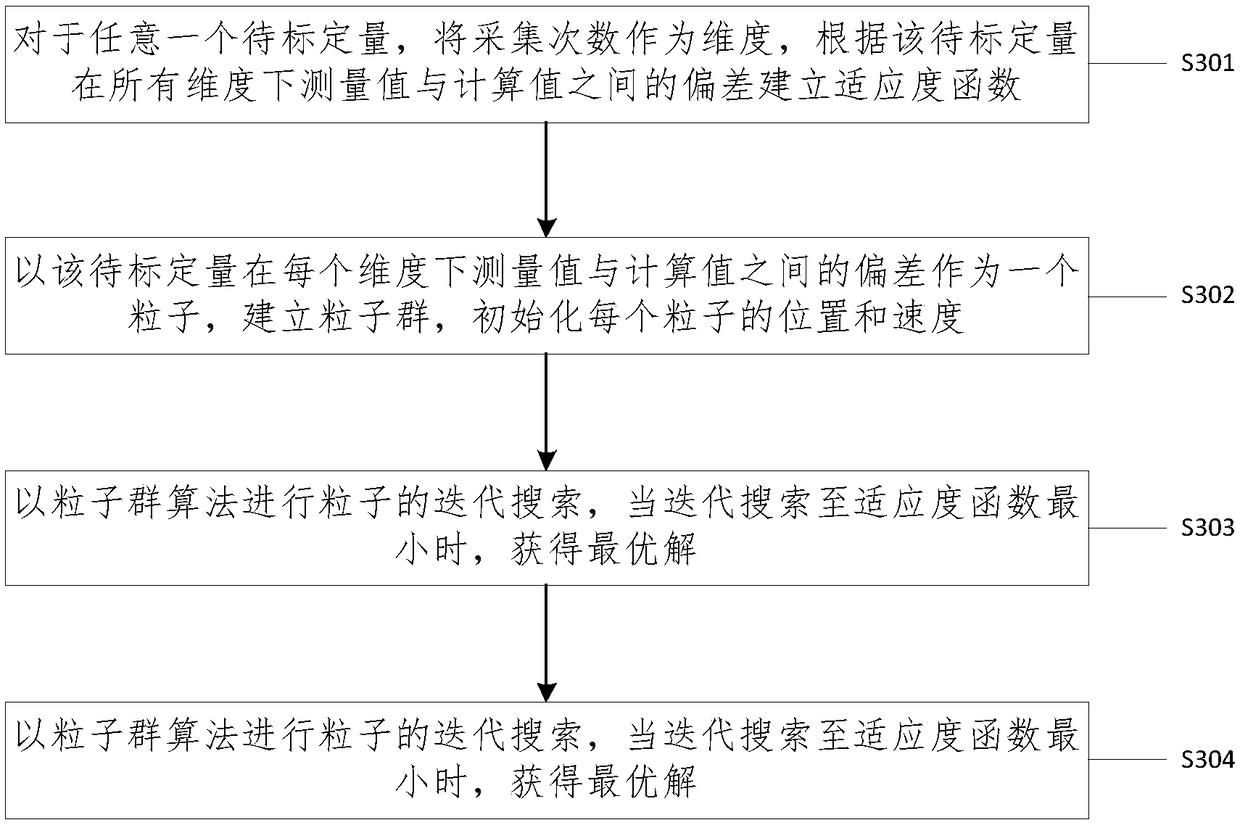
[0049] figure 1 It shows a schematic flow chart of the calibration method of the robot in the embodiment of the present invention. The calibration method of the robot in the embodiment of the present invention determines the parameters related to each quantity to be calibrated, and first uses the multi-dimensional particle swarm algorithm to calculate the optimal compensation value of all parameters. To achieve the purpose of rapid convergence, and then through the multi-dimensional particle swarm algorithm and the best compensation value of all parameters, the best compensation value is calculated for each quantity to be calibrated in turn, and the calibration of all the q...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More