

Manipulator based on spherical screw pair
A technology of manipulator and helical pair, which is applied in the field of manipulator based on spherical helical pair, can solve problems such as difficulty in guaranteeing the safety performance of jaws
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] see Figure 1-7 As shown, the embodiments of the present invention will be described in detail.
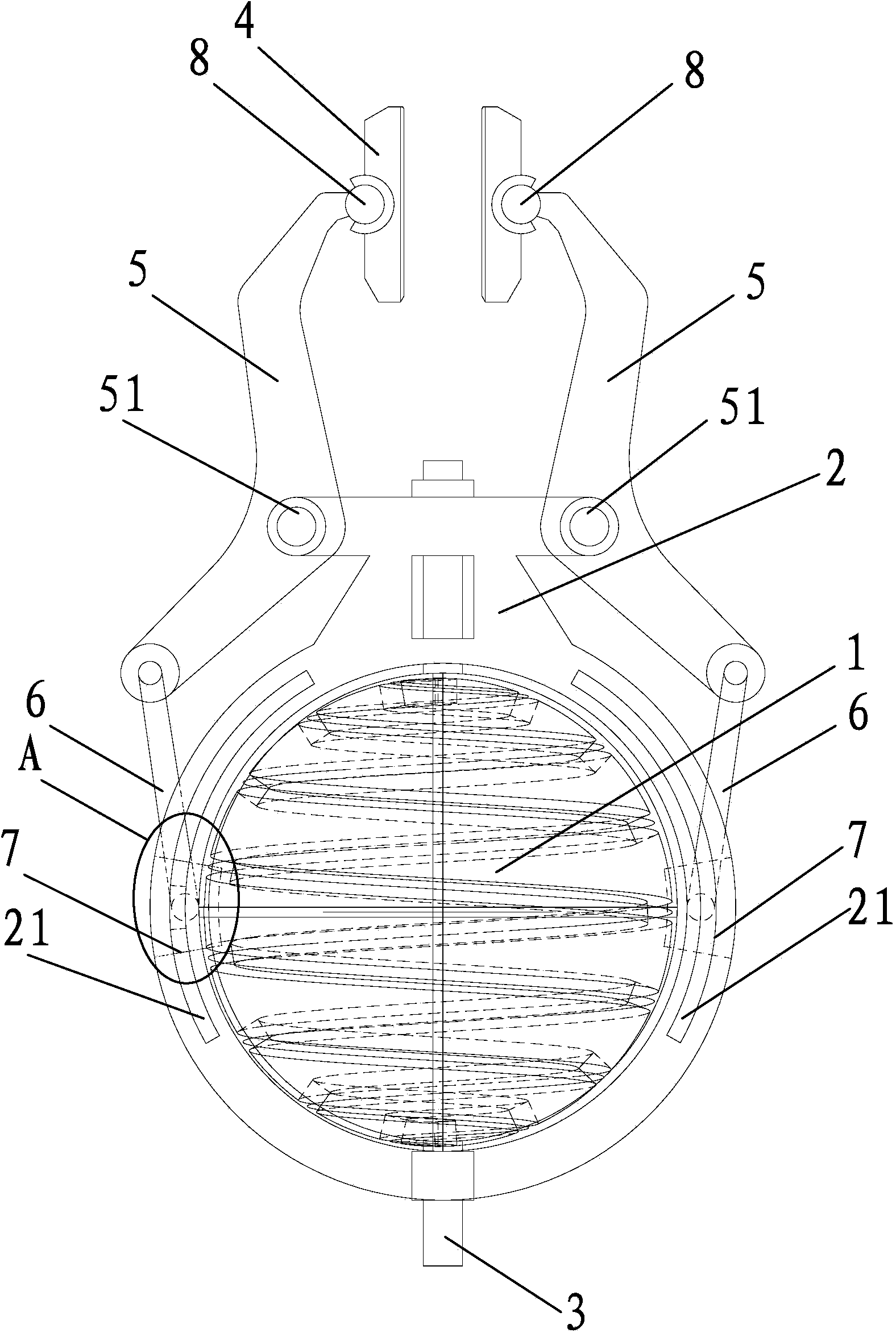
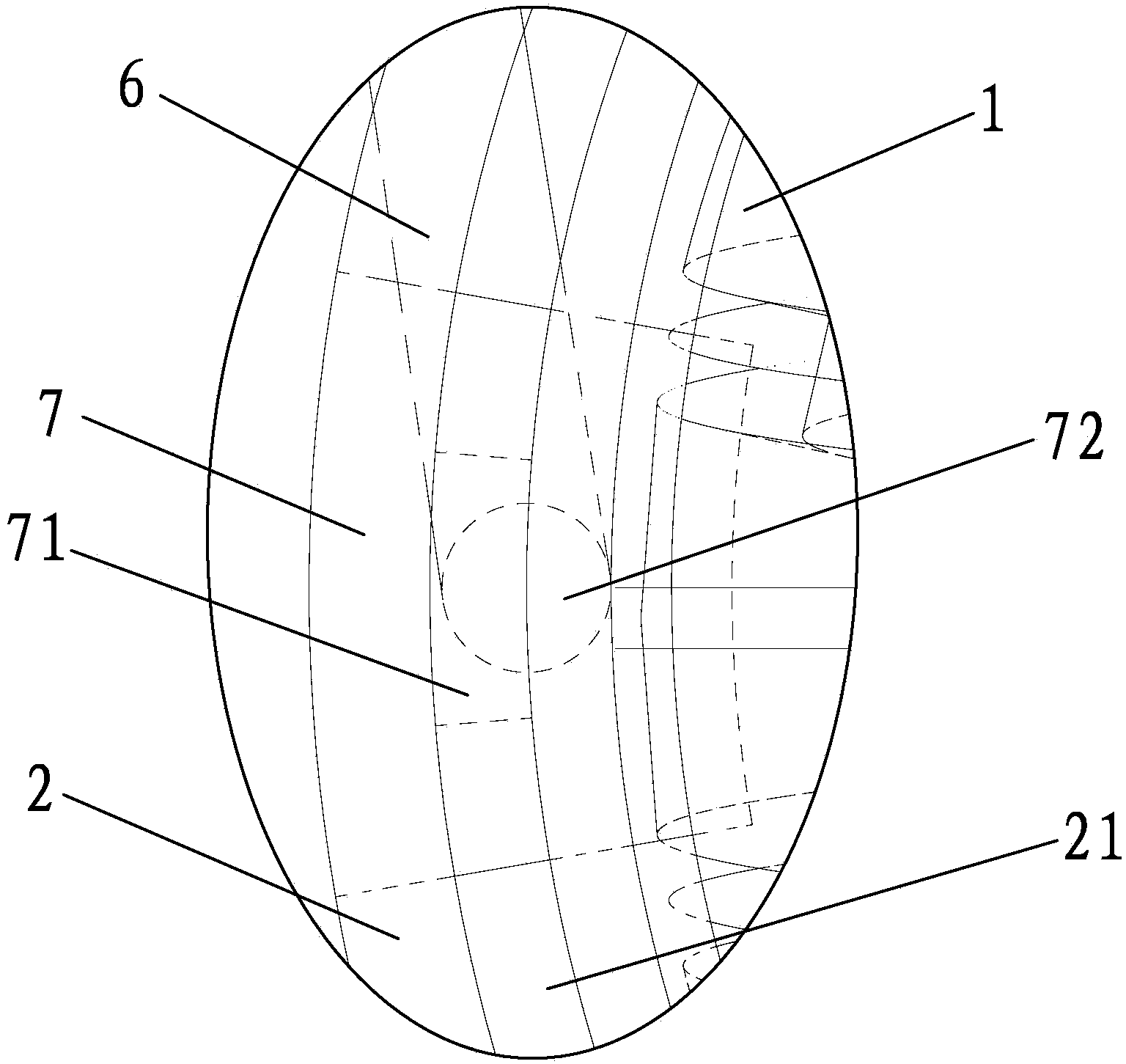
[0025] key reference Figure 1~2 , the present invention relates to a manipulator based on a spherical screw pair, the manipulator includes a ball helix 1, a frame mechanism 2, a rotating shaft 3, two jaws 4, two clamping beams 5 and two connecting rods 6, the The ball helix 1 is arranged in the frame mechanism 2, the rotating shaft 3 is connected to the bottom of the ball helix 1, and the frame mechanism 2 is respectively provided with an arc-shaped chute 21 along both sides of the ball helix 1, two sliders 7 is embedded in the corresponding chute 21 through the convex key 71, each of the sliders 7 is slidingly engaged with the ball helical groove 11 on the ball helix 1, and each of the sliders 7 is connected to the corresponding chute through a connecting rod 6. One end of the clamping beam 5 is pivotally connected, and the other end of each clamping beam 5 is linked wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More