A compact lower extremity exoskeleton drive device
A driving device and exoskeleton technology, applied in medical science, prosthesis, etc., can solve the problems of large space occupied by the device, limited torque application range, inconvenient loading and unloading, etc., and achieve the effect of compact structure and large joint driving torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
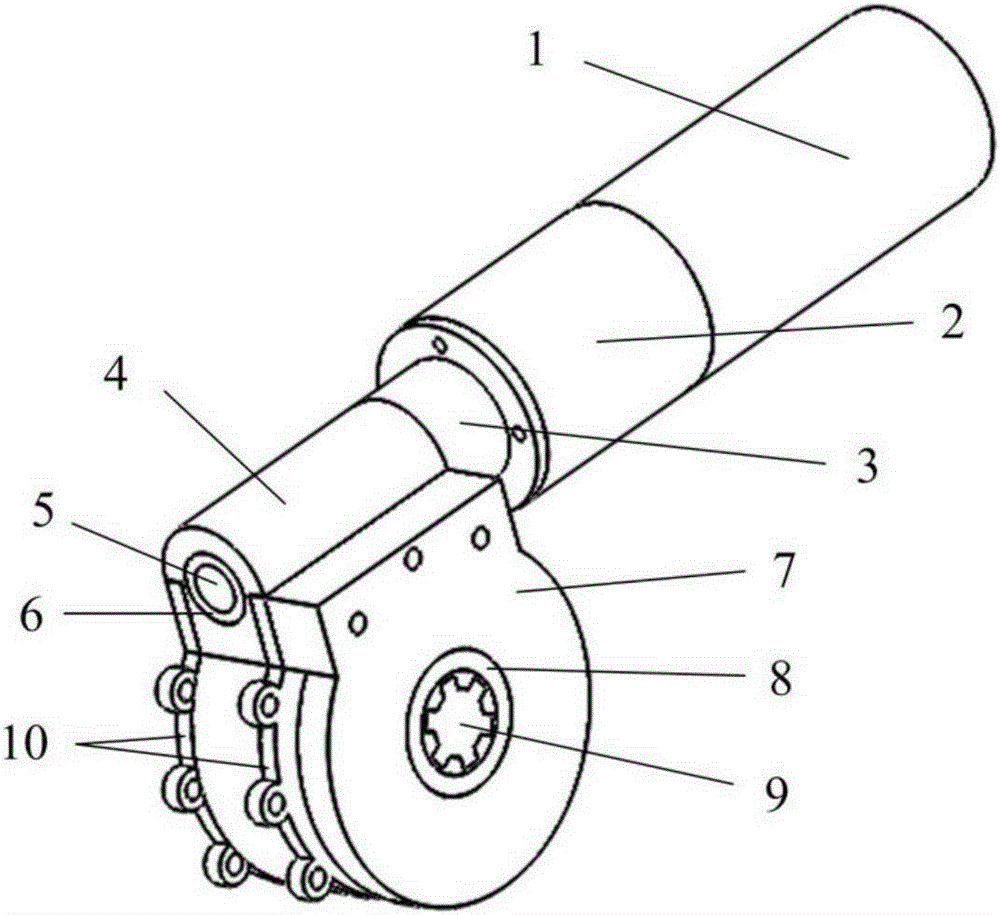
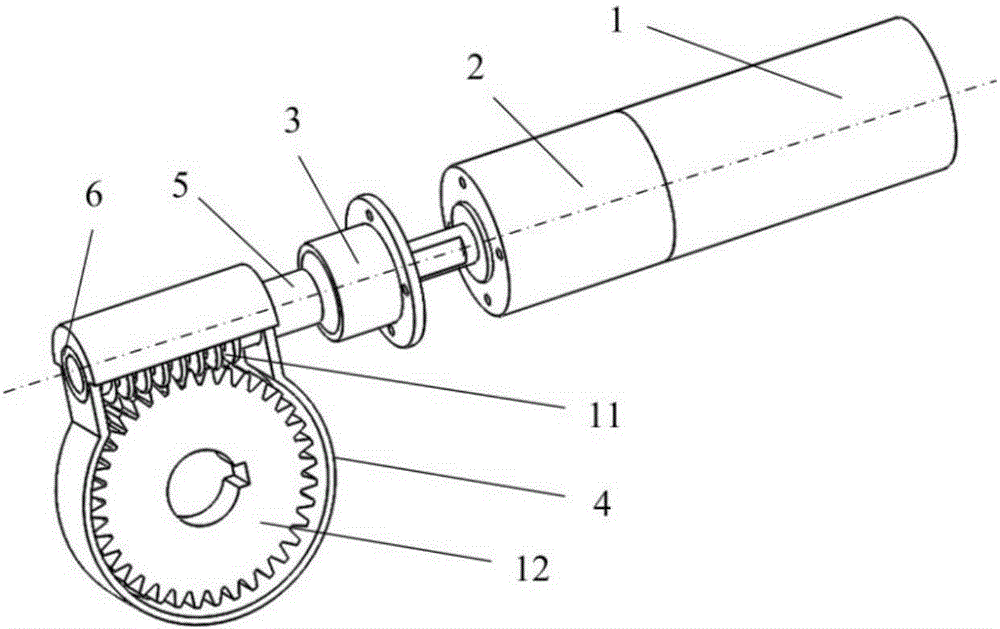
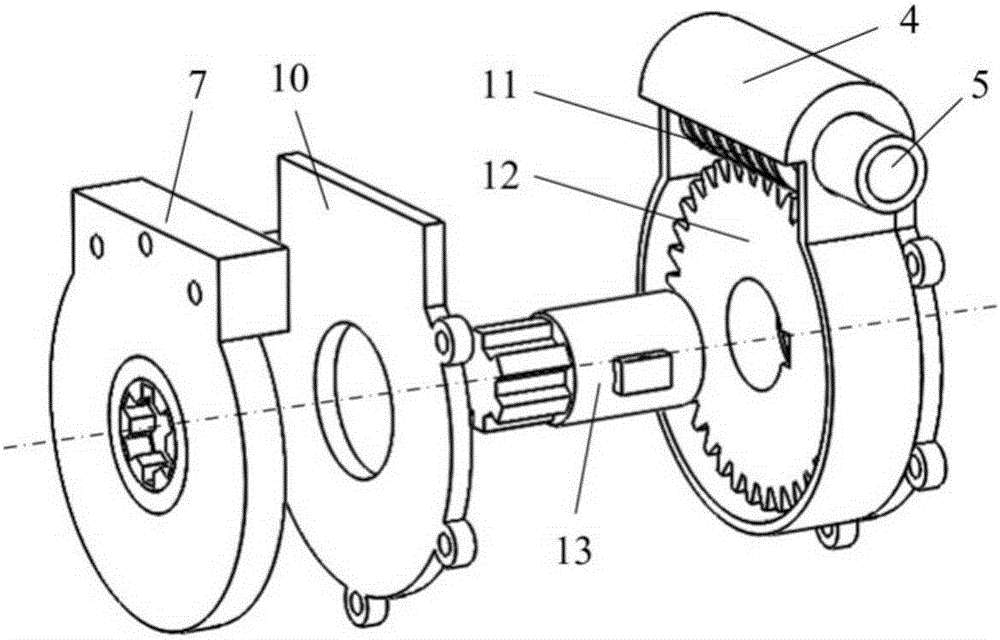
[0016] figure 1 , figure 2 and image 3 An embodiment of a compact lower extremity exoskeleton driving device of the present invention is shown: a compact lower extremity exoskeleton driving device includes a high-speed DC brushless motor 1, a planetary reducer 2, a worm 5, a worm gear 12 and an output The shaft 9, the worm 5 is fixedly installed in the input housing 4 through the bearing 6, the worm gear 12 is fixed in the output housing 7 through the baffles 10 on both sides, and the worm 5 passes through the worm gear 11 and the worm gear 12 The high-speed brushless DC motor 1 and the planet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More