

Initiative anticollision self-adapting fuzzy control method for vehicle
An adaptive fuzzy control method technology, applied in the automotive field, can solve problems such as limited levels, controller internal parameter configurations that cannot be changed with changes in control conditions, and rough control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings.
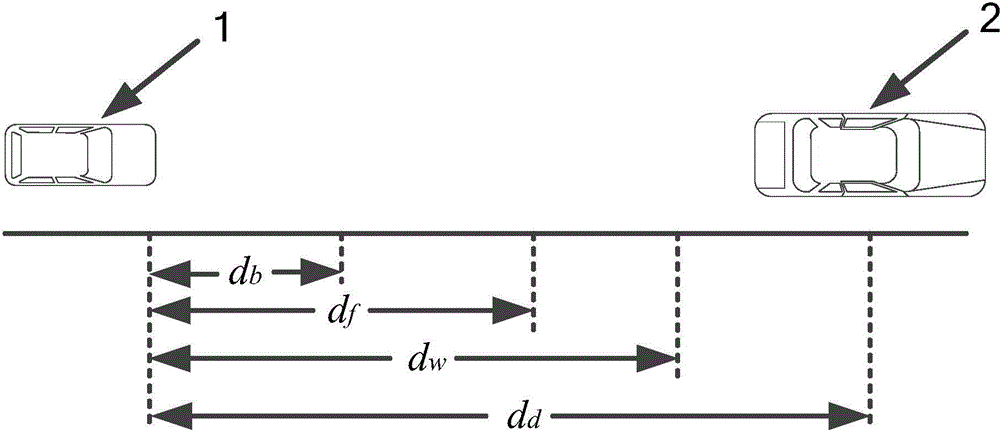
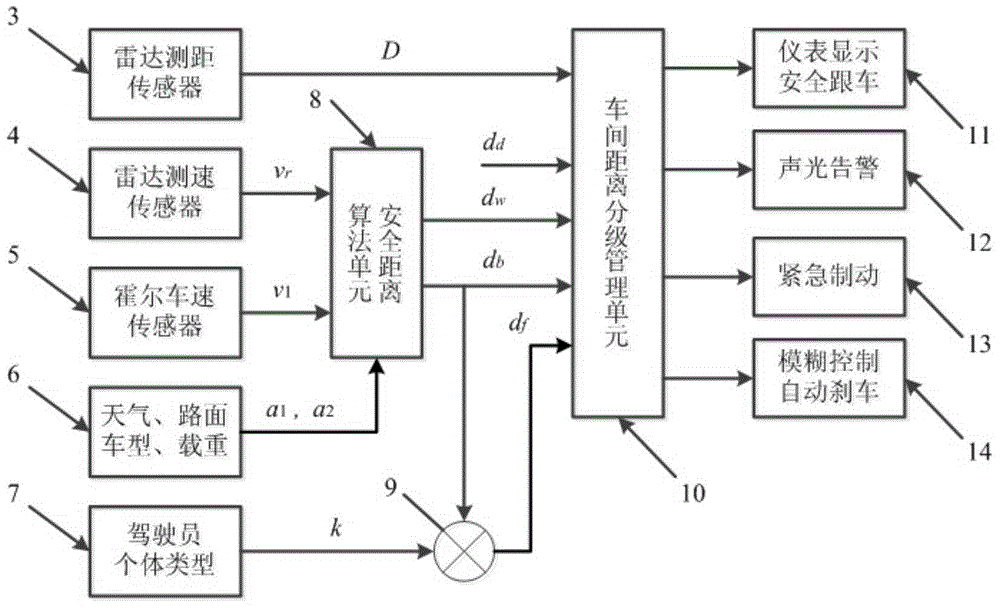
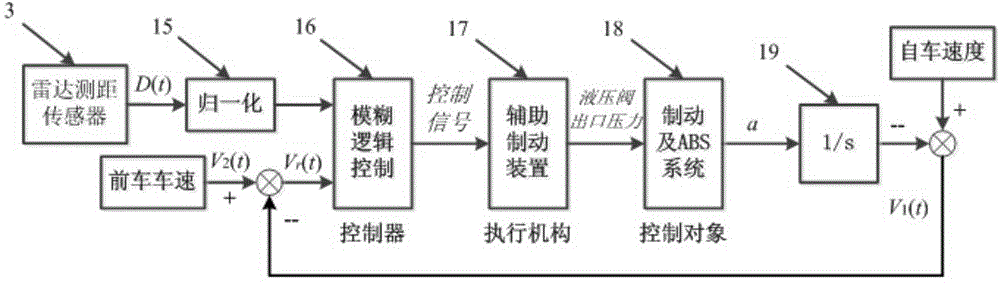
[0026] The present invention relates to an adaptive fuzzy control method for automobile active collision avoidance technology, and its safety distance and inter-vehicle distance are as follows: figure 1 As shown, the system structure of inter-vehicle distance hierarchical management and fuzzy control is as follows: figure 2 , image 3 shown.
[0027] Self-vehicle 1 and front vehicle 2 are driving on the lane, and the actual inter-vehicle distance can be measured as D by the radar ranging sensor 3 on self-vehicle 1. According to the size of the inter-vehicle distance, the control behavior of self-vehicle 1 can be divided into four Levels, corresponding to display safe following distance d d , warning distance d w , fuzzy control automatic braking distance d f and emergency braking distance d b . The relationship between the grading threshold distances of the fou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More