

Single-camera automobile collision avoidance method based on risk balancing of safe distance and collision time
A technology of collision time and safety distance, applied to vehicle components, circuits or fluid pipelines, signal devices, etc., can solve the problem of simultaneously obtaining complex sensor devices, and achieve the effects of reducing costs, simplifying sensor settings, and controlling accurately
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described below in conjunction with the accompanying drawings.
[0045] (1) The method of calculating the inter-vehicle distance with a single camera.
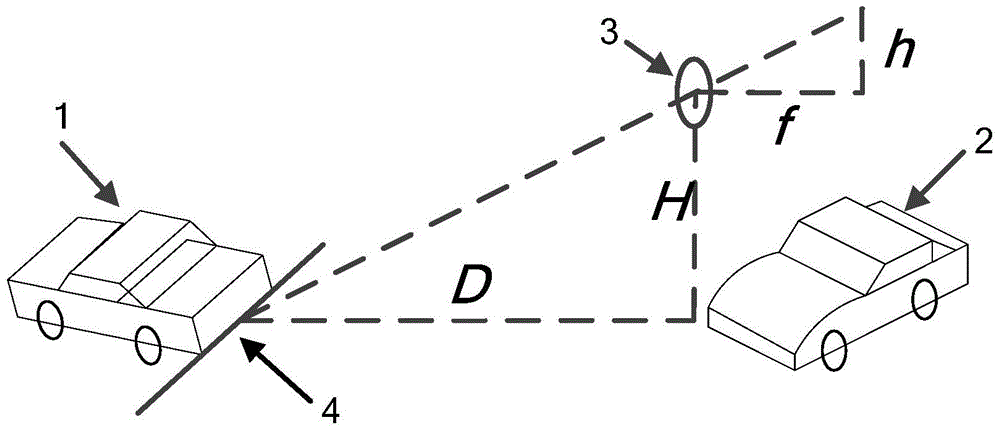
[0046] as attached figure 1 As shown, the inter-vehicle distance between the vehicle 1 in front and the vehicle 2 in front is D, and the camera lens 3 installed on the vehicle 1 projects the image of the vehicle 1 in front on the photosensitive screen. Suppose the focal length of the lens is f, the height of the camera installation position from the ground is H, and the distance between the projection of the boundary line 4 between the wheel and the road on the photosensitive screen and the focal length center is h, then the inter-vehicle distance is,
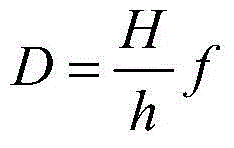
[0047] D = H h f - - - ( 1 )
[0048] (2) A method for calculating the relativ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More