

Human and robot identification and location method based on intelligent optical fiber floor
A technology of intelligent optical fiber and robot, which is applied in the direction of instruments, measuring devices, surveying and navigation, etc., to achieve the effects of strong adaptability, simple operation, high accuracy of measurement and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0028] A method for identifying and locating people and robots based on an intelligent optical fiber floor, comprising the following steps:
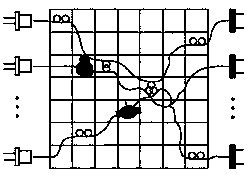
[0029] S1: if figure 1 As shown, the indoor floor is divided into N×N grids, N is a positive integer, and the size of each grid is LxL cm 2 . Assuming that a person or robot can only be in one grid at a certain moment, this grid is the position of the target. For the convenience of representation, the ijth grid represents the grid in the i-th row and j-th column on the floor.
[0030] S2: According to the floor grid division, lay M optical fiber sensors in the grid, where M is a positive integer.
[0031] S3: Construct the optical fiber sensor measurement model: use an M-bit code y to represent the output of M optical fiber sensors, wherein the nth bit y(n) represents the output of the nth optical fiber sensor, n=1...M; the output of the optical fiber sensor y(n) takes values in {0,1,2}; y(n)=0 means that the nth fiber optic sensor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More