

High-resolution camera different-field-of-view integral time determination method
A technology of integrating time and determining the method, which is applied in the field of optical remote sensing, and can solve the problems of not considering the influence of camera installation angle and satellite attitude angular velocity, mismatching of actual time, and not considering pole shift, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The present invention will be further described below in conjunction with the accompanying drawings.
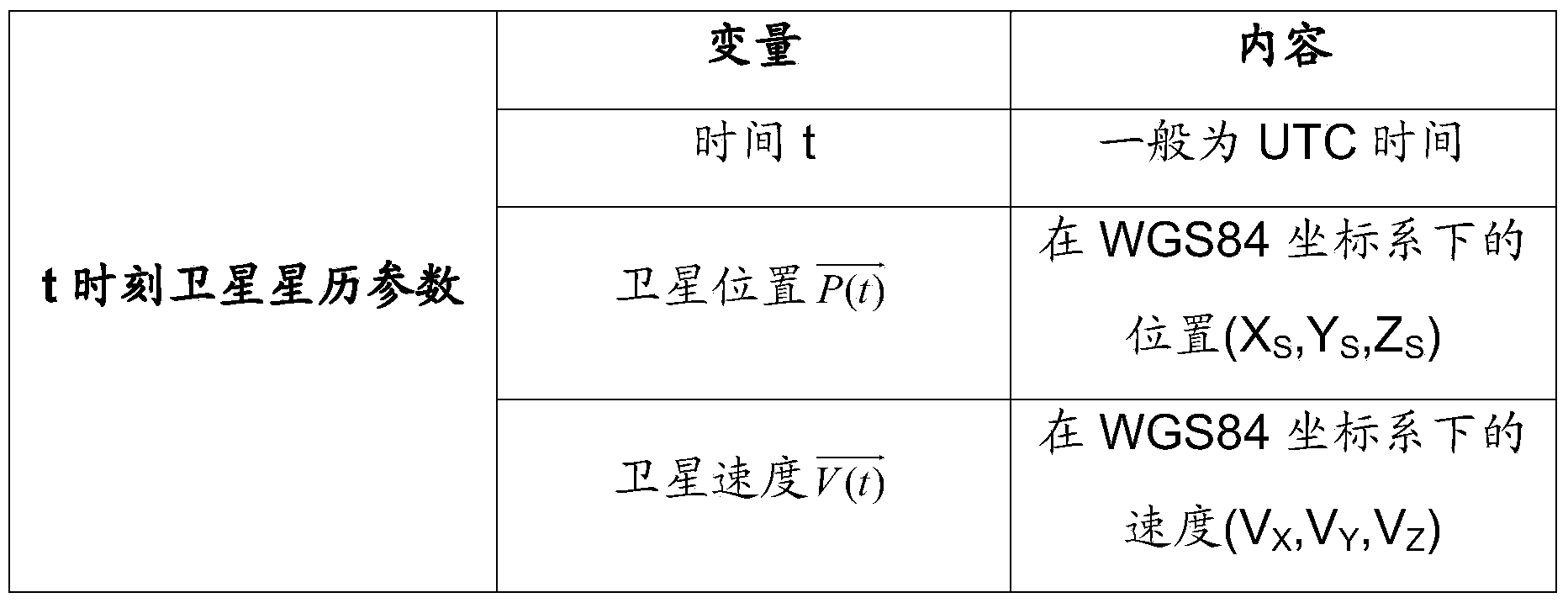
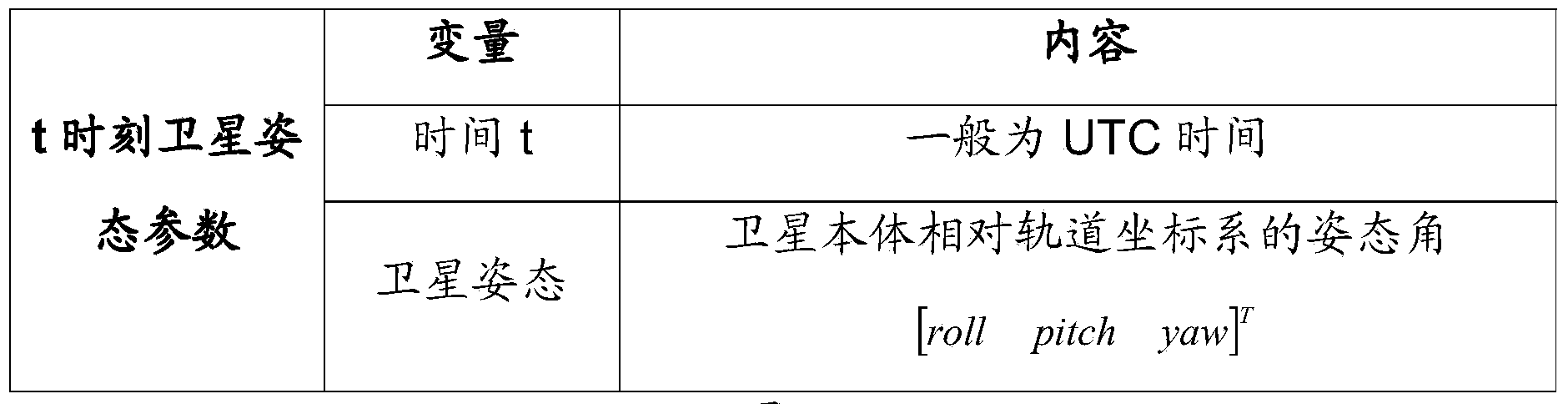
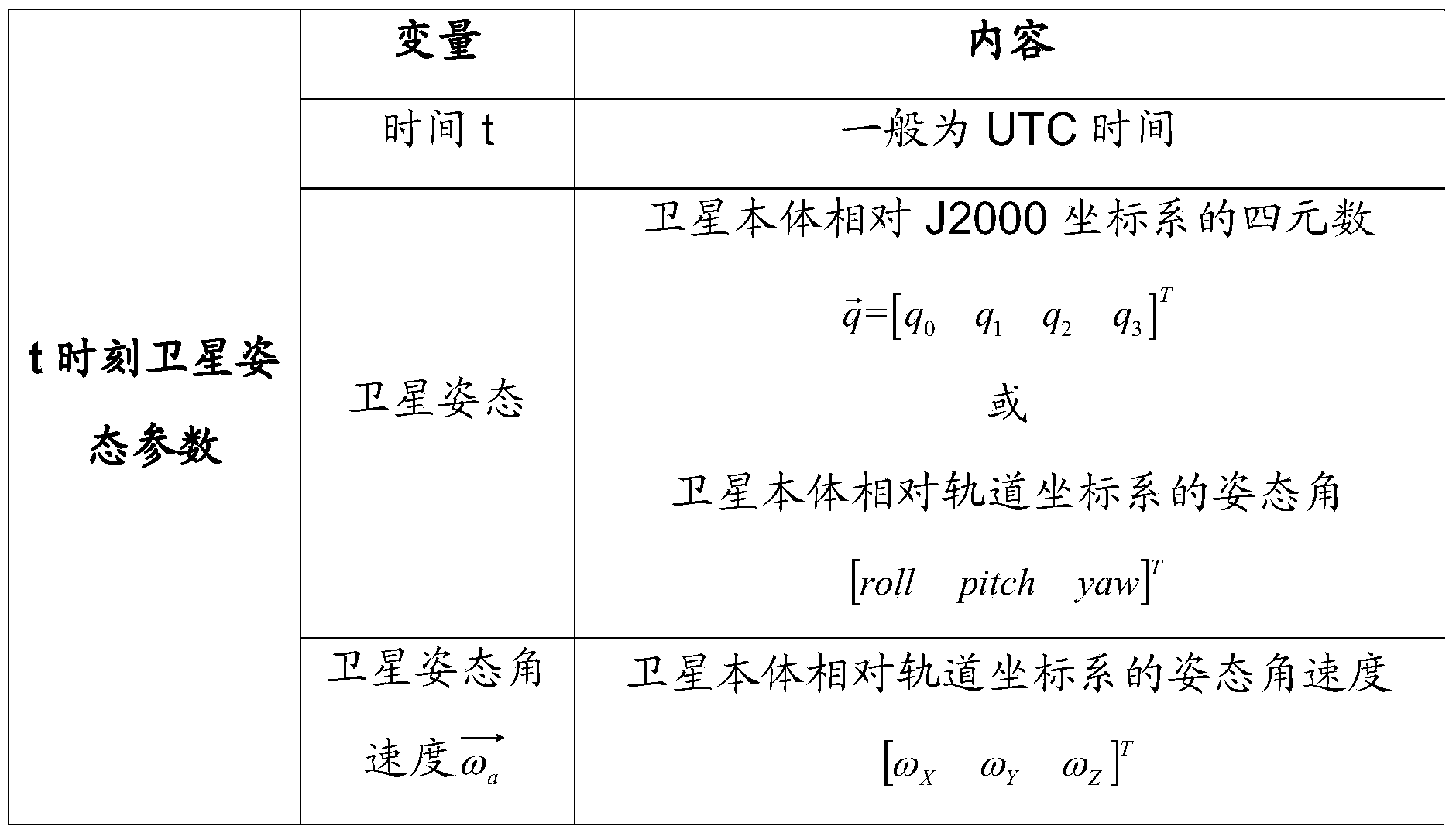
[0088] First determine the relevant parameters of the camera needed to accurately calculate the integration time, and press Figure 4 Determine the Ф and θ angles corresponding to the θ field of view of the camera, press figure 1 with image 3 Prepare satellite ephemeris parameters and satellite attitude parameters respectively; then follow Figure 5 Realize the conversion of camera θ field of view to WGS84 coordinate system, according to Image 6 with Figure 7 The camera θ field of view corresponding to the line of sight is intersected with the earth ellipsoid in the WGS84 coordinate system to determine the geographic coordinates of the photography point, and the slant distance of the photography point can be obtained according to the geographic coordinates of the photography point and the satellite position. In addition, according to Figure 8 Calculate the mov...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More