

Water-skipper-imitated water sports robot
A water sports and robot technology, applied in the field of robots and bionic robots, can solve the problems that surface robots cannot freely switch between sliding and jumping states
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
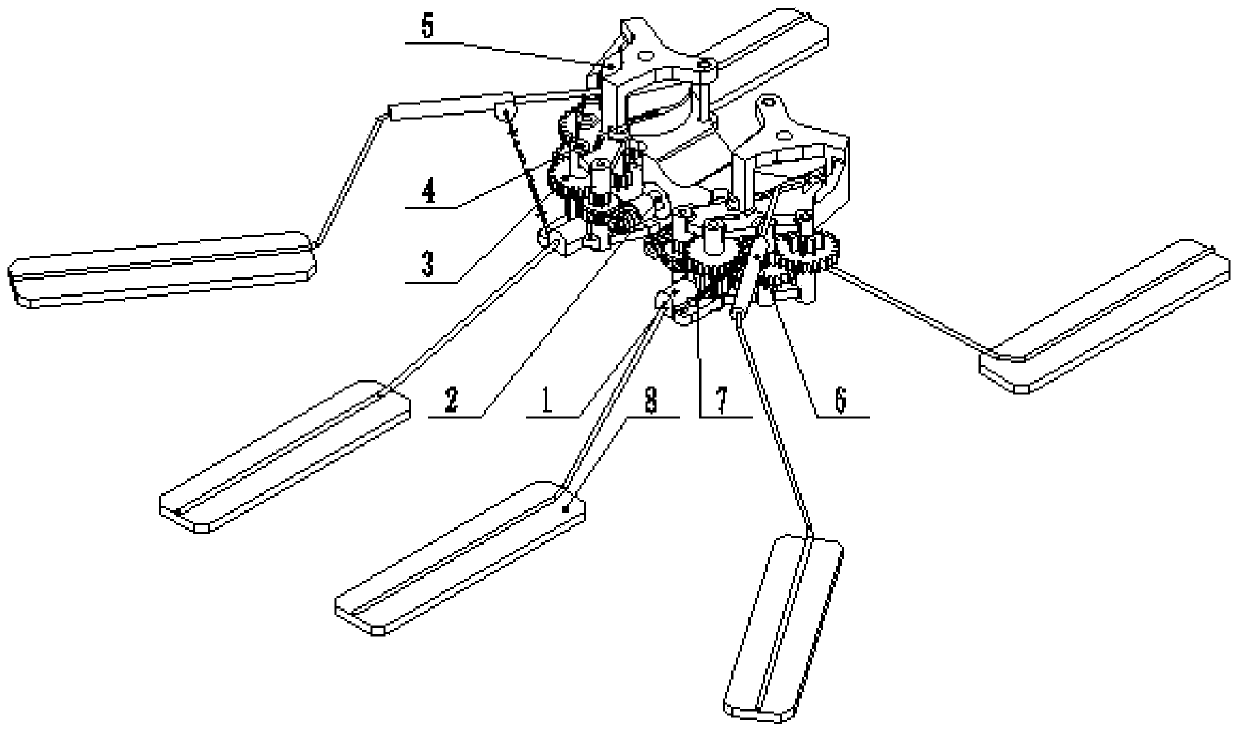
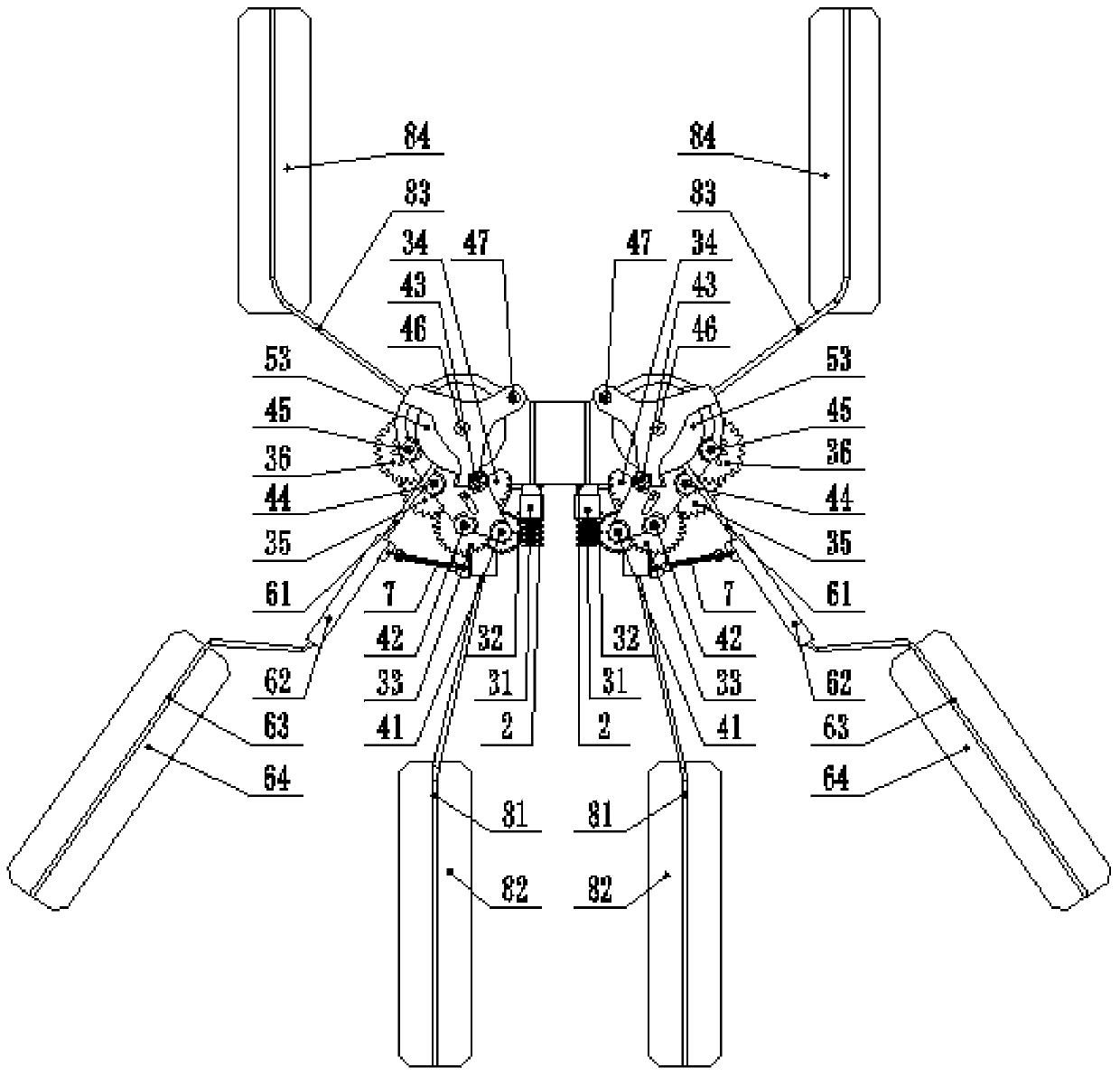
[0020] Specific implementation mode one: combine Figure 1 to Figure 10 Describe the present embodiment, which includes a frame 1 with a symmetrical structure, two sets of DC motors 2 symmetrically arranged along the center line of the frame 1, a worm gear reduction group 3, a pin shaft 4, a cam group 5, a driving leg 6, Spring 7 and supporting leg 8;
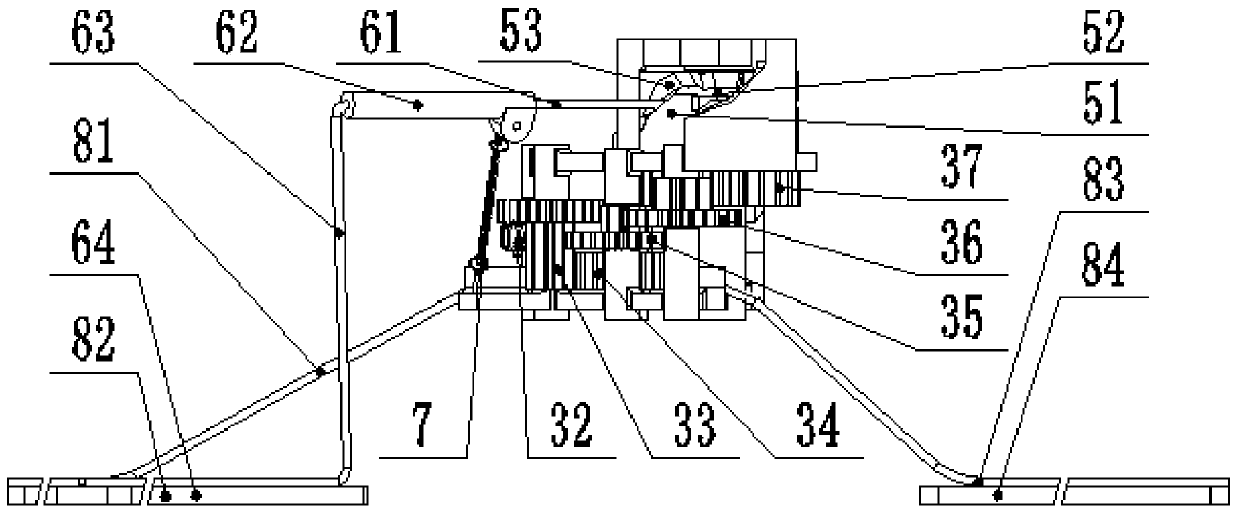
[0021] The worm gear reduction group 3 includes a worm 31, a worm wheel 32, a first gear 33, a second gear 34, a third gear 35, a fourth gear 36 and a fifth gear 37, and the pin shaft 4 includes a first rotating shaft 41 and a second rotating shaft 42 , the third rotating shaft 43, the fourth rotating shaft 44, the fifth rotating shaft 45, the sixth rotating shaft 46, the support shaft 47, the rotating shaft 48 and the connecting shaft 49, the cam group 5 includes a first cam base 51, a rotating body 52 and a cam top cover 53 , the active leg 6 includes a cam connecting rod 61, an ear connector 62, an active leg bar 63 and an ...
specific Embodiment approach 2
[0027] Specific implementation mode two: combination Figure 1 to Figure 10 To illustrate this embodiment, the upper part of the cam base 51 of this embodiment is provided with a first groove 511, a first protrusion 512, a second groove 513 and a second protrusion 514 connected in sequence, and the groove 511 reaches the bottom of the cam base 51. The distance from the end is greater than the distance from the groove 512 to the bottom end of the cam base 51, and the distance from the protrusion 512 to the bottom end of the cam base 51 is smaller than the distance from the protrusion 514 to the bottom end of the cam base 51. The first protrusion 512 and the second protrusion 514 are used to limit the cam connection rod 61 under the tension of the spring 7 . The first protrusion 512 and the second protrusion 514 are used to limit the cam connecting rod 61 under the tension of the spring 7, and the curved surface 515 is designed according to the set leg motion trajectory. The cur...
specific Embodiment approach 3
[0028] Specific implementation mode three: combination Figure 1 to Figure 10 To illustrate this embodiment, the worm gear reduction group 3 of this embodiment is a 6-stage reduction, the reduction ratio is 5140:1, the worm gear modulus is 0.2 mm to 0.3 mm, the worm gear 32, the first gear 33, the second gear 34, Both the third gear 35 and the fourth gear 36 are cone wheels. Other compositions and connections are the same as in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More